Robotics
arXiv:cs.RO
Covers all aspects of robotics, including robotic systems design, motion planning, and robot learning.
Looking for a broader view? This category is part of:
Covers all aspects of robotics, including robotic systems design, motion planning, and robot learning.
Looking for a broader view? This category is part of:
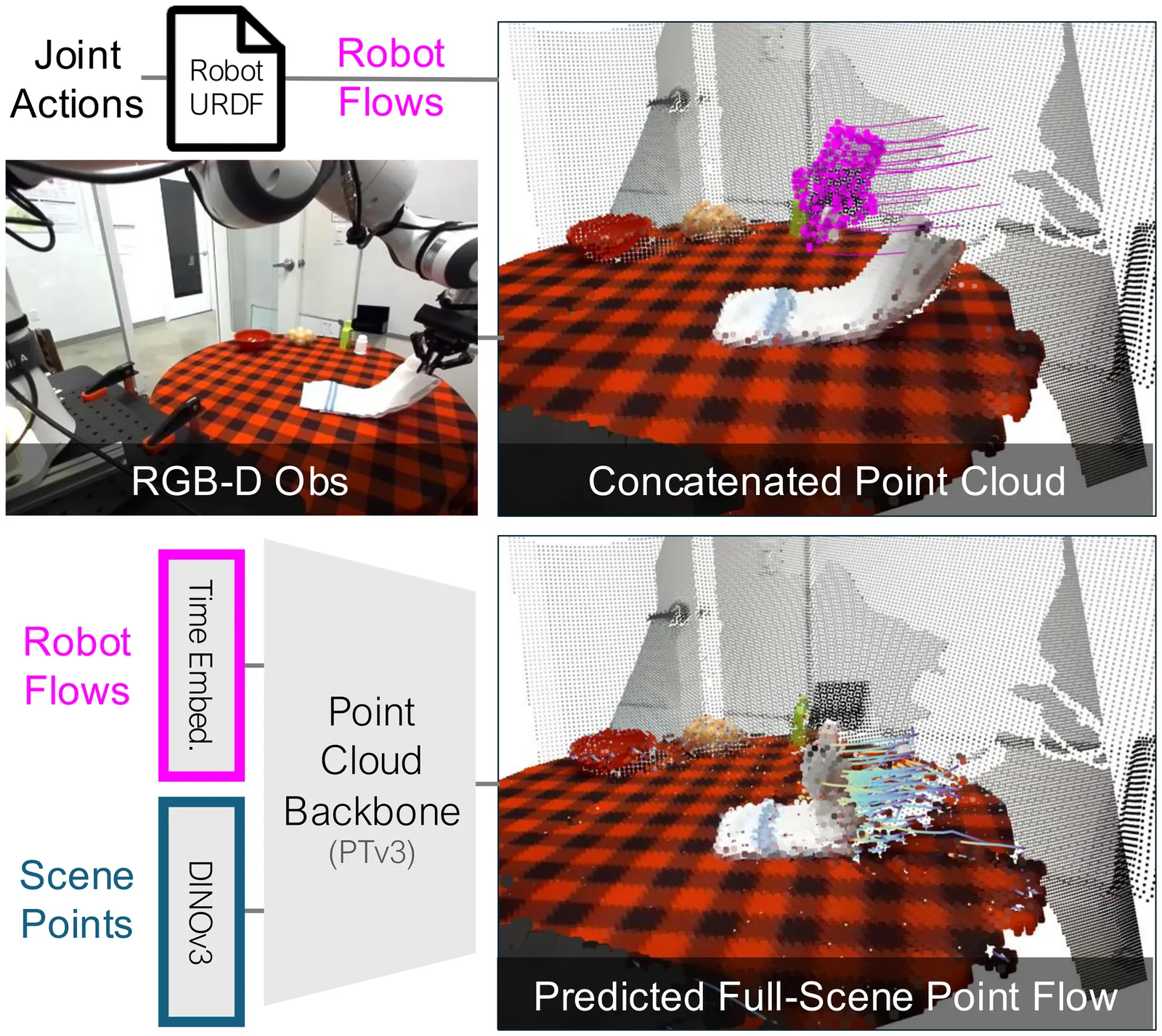
Humans anticipate, from a glance and a contemplated action of their bodies, how the 3D world will respond, a capability that is equally vital for robotic manipulation. We introduce PointWorld, a large pre-trained 3D world model that unifies state and action in a shared 3D space as 3D point flows: given one or few RGB-D images and a sequence of low-level robot action commands, PointWorld forecasts per-pixel displacements in 3D that respond to the given actions. By representing actions as 3D point flows instead of embodiment-specific action spaces (e.g., joint positions), this formulation directly conditions on physical geometries of robots while seamlessly integrating learning across embodiments. To train our 3D world model, we curate a large-scale dataset spanning real and simulated robotic manipulation in open-world environments, enabled by recent advances in 3D vision and simulated environments, totaling about 2M trajectories and 500 hours across a single-arm Franka and a bimanual humanoid. Through rigorous, large-scale empirical studies of backbones, action representations, learning objectives, partial observability, data mixtures, domain transfers, and scaling, we distill design principles for large-scale 3D world modeling. With a real-time (0.1s) inference speed, PointWorld can be efficiently integrated in the model-predictive control (MPC) framework for manipulation. We demonstrate that a single pre-trained checkpoint enables a real-world Franka robot to perform rigid-body pushing, deformable and articulated object manipulation, and tool use, without requiring any demonstrations or post-training and all from a single image captured in-the-wild. Project website at https://point-world.github.io/.
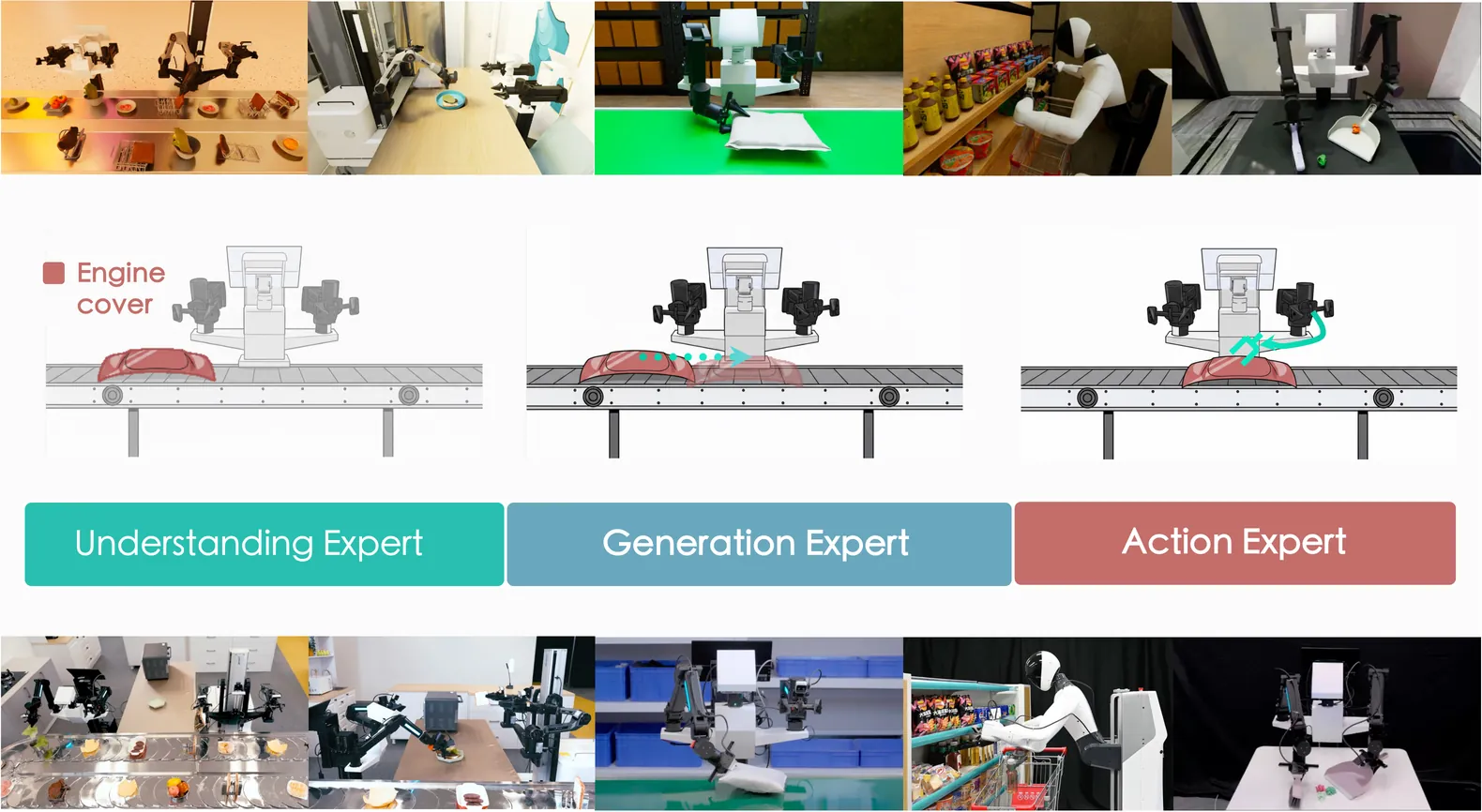
Prevalent Vision-Language-Action (VLA) models are typically built upon Multimodal Large Language Models (MLLMs) and demonstrate exceptional proficiency in semantic understanding, but they inherently lack the capability to deduce physical world dynamics. Consequently, recent approaches have shifted toward World Models, typically formulated via video prediction; however, these methods often suffer from a lack of semantic grounding and exhibit brittleness when handling prediction errors. To synergize semantic understanding with dynamic predictive capabilities, we present InternVLA-A1. This model employs a unified Mixture-of-Transformers architecture, coordinating three experts for scene understanding, visual foresight generation, and action execution. These components interact seamlessly through a unified masked self-attention mechanism. Building upon InternVL3 and Qwen3-VL, we instantiate InternVLA-A1 at 2B and 3B parameter scales. We pre-train these models on hybrid synthetic-real datasets spanning InternData-A1 and Agibot-World, covering over 533M frames. This hybrid training strategy effectively harnesses the diversity of synthetic simulation data while minimizing the sim-to-real gap. We evaluated InternVLA-A1 across 12 real-world robotic tasks and simulation benchmark. It significantly outperforms leading models like pi0 and GR00T N1.5, achieving a 14.5\% improvement in daily tasks and a 40\%-73.3\% boost in dynamic settings, such as conveyor belt sorting.
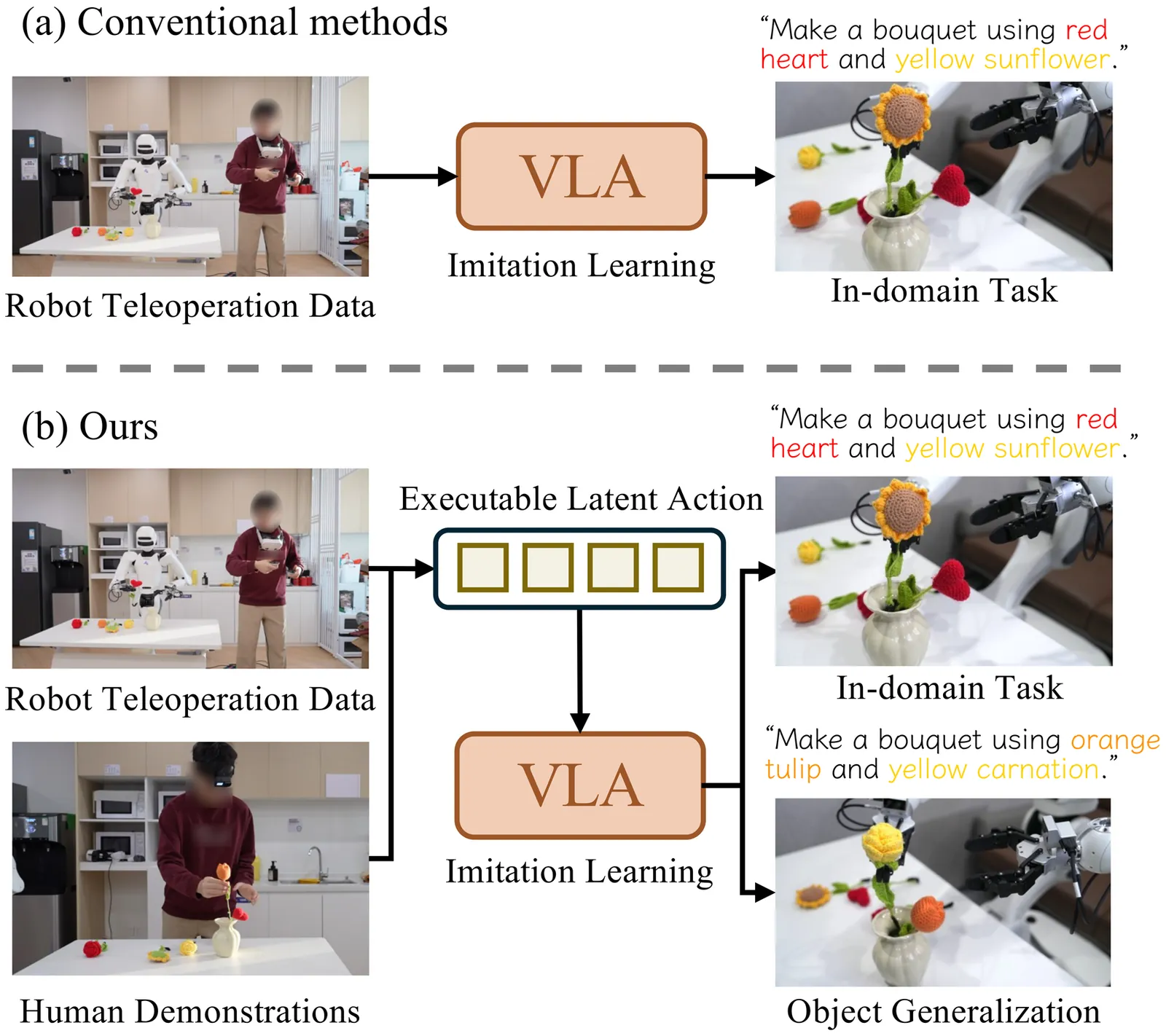
Generalist Vision-Language-Action models are currently hindered by the scarcity of robotic data compared to the abundance of human video demonstrations. Existing Latent Action Models attempt to leverage video data but often suffer from visual entanglement, capturing noise rather than manipulation skills. To address this, we propose Contrastive Latent Action Pretraining (CLAP), a framework that aligns the visual latent space from videos with a proprioceptive latent space from robot trajectories. By employing contrastive learning, CLAP maps video transitions onto a quantized, physically executable codebook. Building on this representation, we introduce a dual-formulation VLA framework offering both CLAP-NTP, an autoregressive model excelling at instruction following and object generalization, and CLAP-RF, a Rectified Flow-based policy designed for high-frequency, precise manipulation. Furthermore, we propose a Knowledge Matching (KM) regularization strategy to mitigate catastrophic forgetting during fine-tuning. Extensive experiments demonstrate that CLAP significantly outperforms strong baselines, enabling the effective transfer of skills from human videos to robotic execution. Project page: https://lin-shan.com/CLAP/.
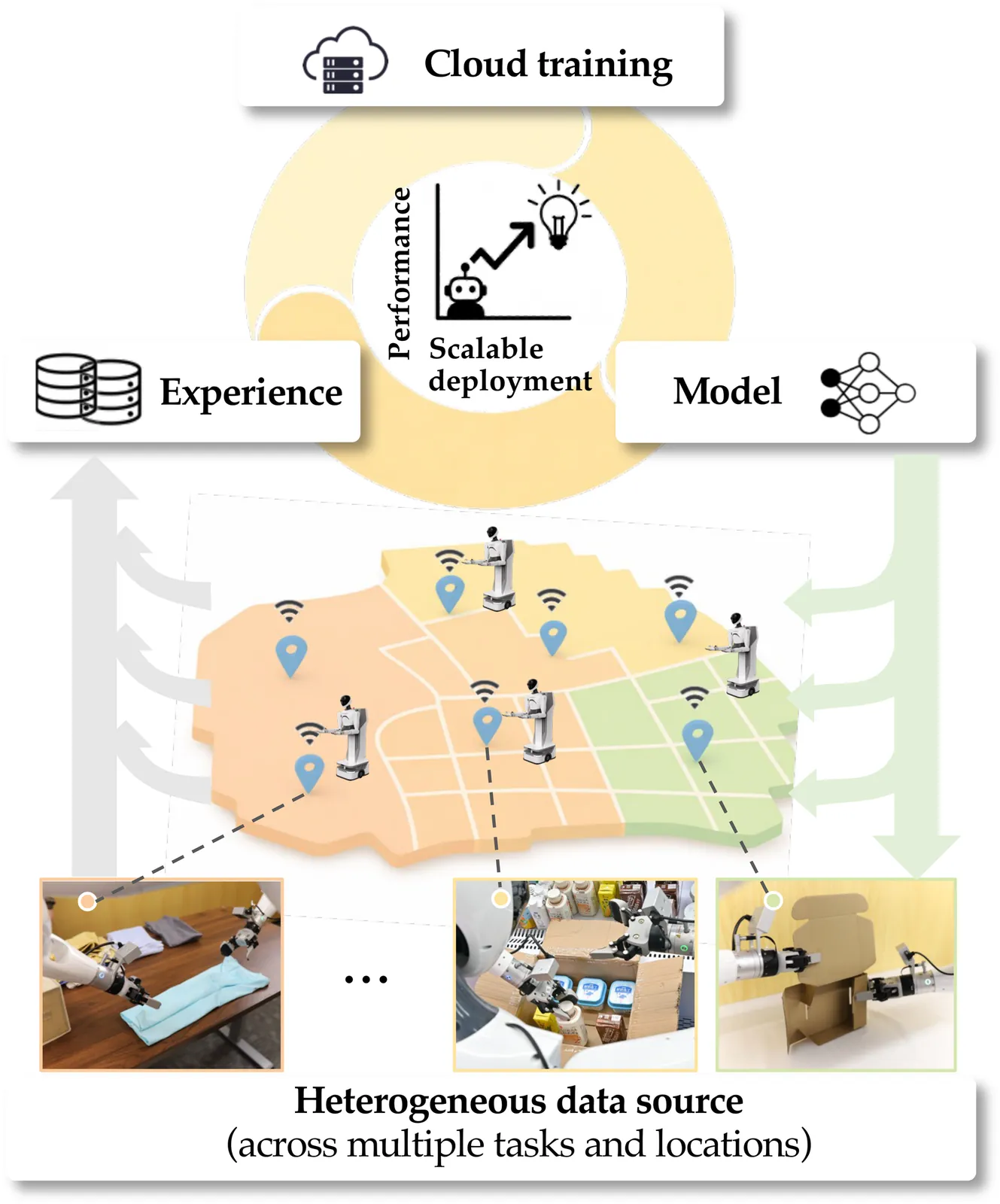
Vision-language-action (VLA) models achieve strong generalization through large-scale pre-training, but real-world deployment requires expert-level task proficiency in addition to broad generality. Existing post-training approaches for VLA models are typically offline, single-robot, or task-specific, limiting effective on-policy adaptation and scalable learning from real-world interaction. We introduce a Scalable Online Post-training (SOP) system that enables online, distributed, multi-task post-training of generalist VLA models directly in the physical world. SOP tightly couples execution and learning through a closed-loop architecture in which a fleet of robots continuously streams on-policy experience and human intervention signals to a centralized cloud learner, and asynchronously receives updated policies. This design supports prompt on-policy correction, scales experience collection through parallel deployment, and preserves generality during adaptation. SOP is agnostic to the choice of post-training algorithm; we instantiate it with both interactive imitation learning (HG-DAgger) and reinforcement learning (RECAP). Across a range of real-world manipulation tasks including cloth folding, box assembly, and grocery restocking, we show that SOP substantially improves the performance of large pretrained VLA models while maintaining a single shared policy across tasks. Effective post-training can be achieved within hours of real-world interaction, and performance scales near-linearly with the number of robots in the fleet. These results suggest that tightly coupling online learning with fleet-scale deployment is instrumental to enabling efficient, reliable, and scalable post-training of generalist robot policies in the physical world.
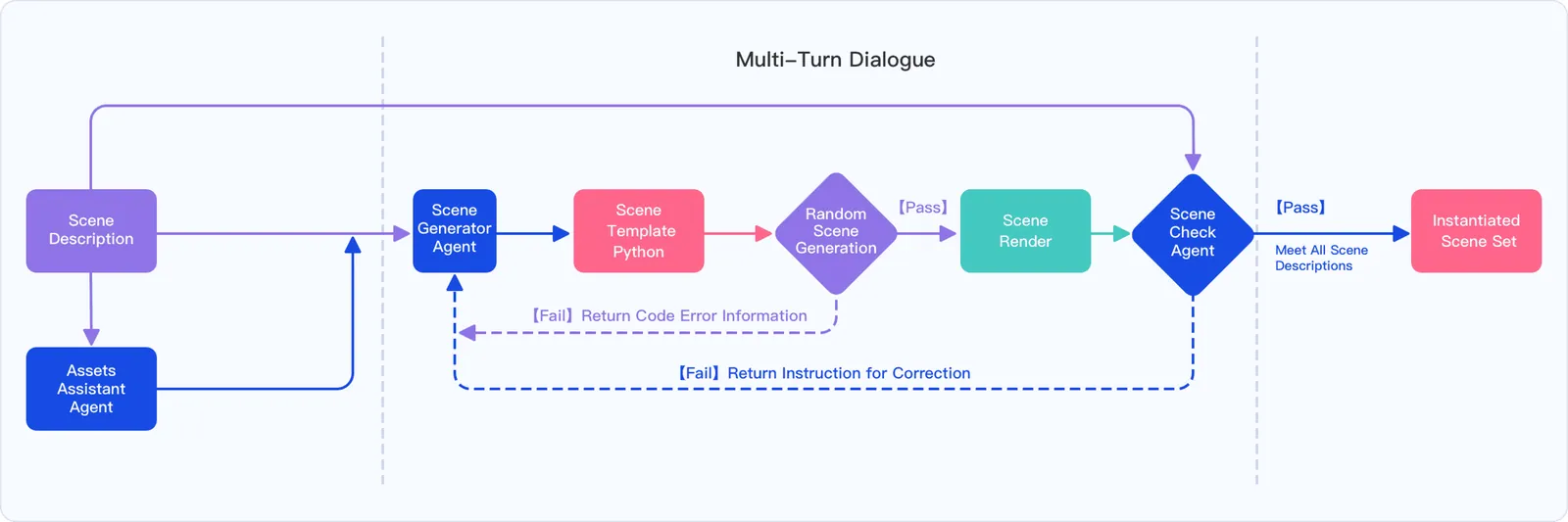
The development of robust and generalizable robot learning models is critically contingent upon the availability of large-scale, diverse training data and reliable evaluation benchmarks. Collecting data in the physical world poses prohibitive costs and scalability challenges, and prevailing simulation benchmarks frequently suffer from fragmentation, narrow scope, or insufficient fidelity to enable effective sim-to-real transfer. To address these challenges, we introduce Genie Sim 3.0, a unified simulation platform for robotic manipulation. We present Genie Sim Generator, a large language model (LLM)-powered tool that constructs high-fidelity scenes from natural language instructions. Its principal strength resides in rapid and multi-dimensional generalization, facilitating the synthesis of diverse environments to support scalable data collection and robust policy evaluation. We introduce the first benchmark that pioneers the application of LLM for automated evaluation. It leverages LLM to mass-generate evaluation scenarios and employs Vision-Language Model (VLM) to establish an automated assessment pipeline. We also release an open-source dataset comprising more than 10,000 hours of synthetic data across over 200 tasks. Through systematic experimentation, we validate the robust zero-shot sim-to-real transfer capability of our open-source dataset, demonstrating that synthetic data can server as an effective substitute for real-world data under controlled conditions for scalable policy training. For code and dataset details, please refer to: https://github.com/AgibotTech/genie_sim.
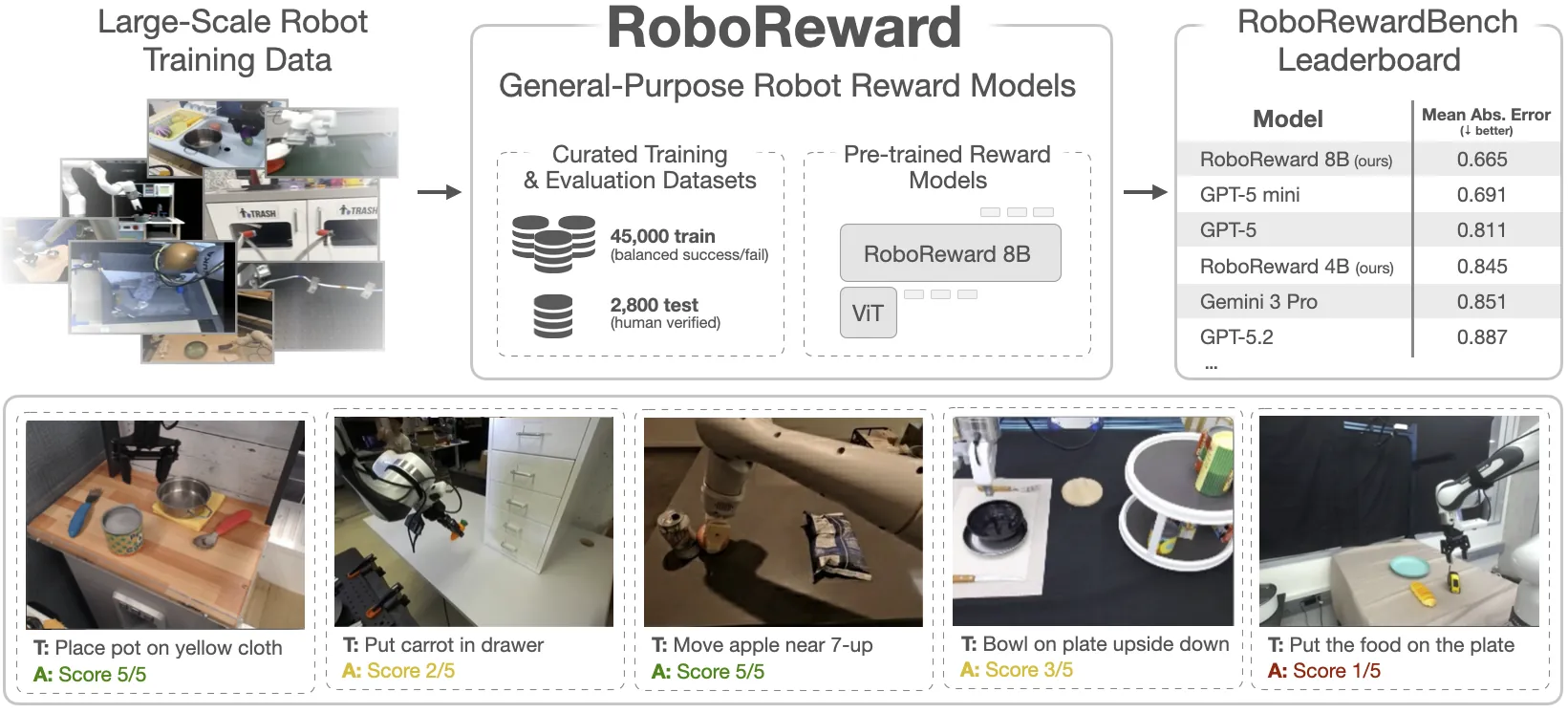
A well-designed reward is critical for effective reinforcement learning-based policy improvement. In real-world robotic domains, obtaining such rewards typically requires either labor-intensive human labeling or brittle, handcrafted objectives. Vision-language models (VLMs) have shown promise as automatic reward models, yet their effectiveness on real robot tasks is poorly understood. In this work, we aim to close this gap by introducing (1) \textbf{RoboReward}, a robotics reward dataset and benchmark built on large-scale real-robot corpora from Open X-Embodiment (OXE) and RoboArena, and (2) vision-language reward models trained on this dataset (RoboReward 4B/8B). Because OXE is success-heavy and lacks failure examples, we propose a \emph{negative examples data augmentation} pipeline that generates calibrated \emph{negatives} and \emph{near-misses} via counterfactual relabeling of successful episodes and temporal clipping to create partial-progress outcomes from the same videos. Using this framework, we produce an extensive training and evaluation dataset that spans diverse tasks and embodiments and enables systematic evaluation of whether state-of-the-art VLMs can reliably provide rewards for robotics. Our evaluation of leading open-weight and proprietary VLMs reveals that no model excels across all tasks, underscoring substantial room for improvement. We then train general-purpose 4B- and 8B-parameter models that outperform much larger VLMs in assigning rewards for short-horizon robotic tasks. Finally, we deploy the 8B-parameter reward VLM in real-robot reinforcement learning and find that it improves policy learning over Gemini Robotics-ER 1.5, a frontier physical reasoning VLM trained on robotics data, by a large margin, while substantially narrowing the gap to RL training with human-provided rewards.
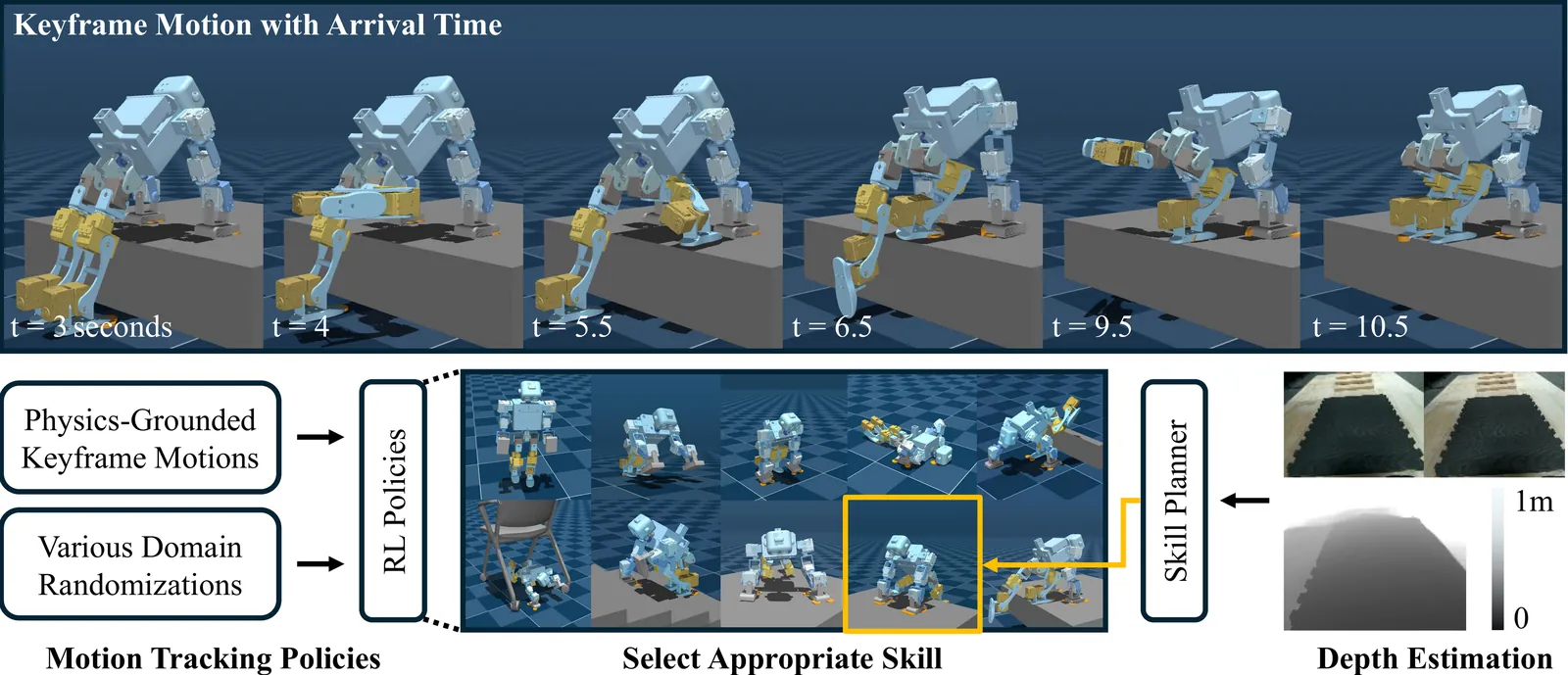
Most locomotion methods for humanoid robots focus on leg-based gaits, yet natural bipeds frequently rely on hands, knees, and elbows to establish additional contacts for stability and support in complex environments. This paper introduces Locomotion Beyond Feet, a comprehensive system for whole-body humanoid locomotion across extremely challenging terrains, including low-clearance spaces under chairs, knee-high walls, knee-high platforms, and steep ascending and descending stairs. Our approach addresses two key challenges: contact-rich motion planning and generalization across diverse terrains. To this end, we combine physics-grounded keyframe animation with reinforcement learning. Keyframes encode human knowledge of motor skills, are embodiment-specific, and can be readily validated in simulation or on hardware, while reinforcement learning transforms these references into robust, physically accurate motions. We further employ a hierarchical framework consisting of terrain-specific motion-tracking policies, failure recovery mechanisms, and a vision-based skill planner. Real-world experiments demonstrate that Locomotion Beyond Feet achieves robust whole-body locomotion and generalizes across obstacle sizes, obstacle instances, and terrain sequences.

As world models gain momentum in Embodied AI, an increasing number of works explore using video foundation models as predictive world models for downstream embodied tasks like 3D prediction or interactive generation. However, before exploring these downstream tasks, video foundation models still have two critical questions unanswered: (1) whether their generative generalization is sufficient to maintain perceptual fidelity in the eyes of human observers, and (2) whether they are robust enough to serve as a universal prior for real-world embodied agents. To provide a standardized framework for answering these questions, we introduce the Embodied Turing Test benchmark: WoW-World-Eval (Wow,wo,val). Building upon 609 robot manipulation data, Wow-wo-val examines five core abilities, including perception, planning, prediction, generalization, and execution. We propose a comprehensive evaluation protocol with 22 metrics to assess the models' generation ability, which achieves a high Pearson Correlation between the overall score and human preference (>0.93) and establishes a reliable foundation for the Human Turing Test. On Wow-wo-val, models achieve only 17.27 on long-horizon planning and at best 68.02 on physical consistency, indicating limited spatiotemporal consistency and physical reasoning. For the Inverse Dynamic Model Turing Test, we first use an IDM to evaluate the video foundation models' execution accuracy in the real world. However, most models collapse to $\approx$ 0% success, while WoW maintains a 40.74% success rate. These findings point to a noticeable gap between the generated videos and the real world, highlighting the urgency and necessity of benchmarking World Model in Embodied AI.
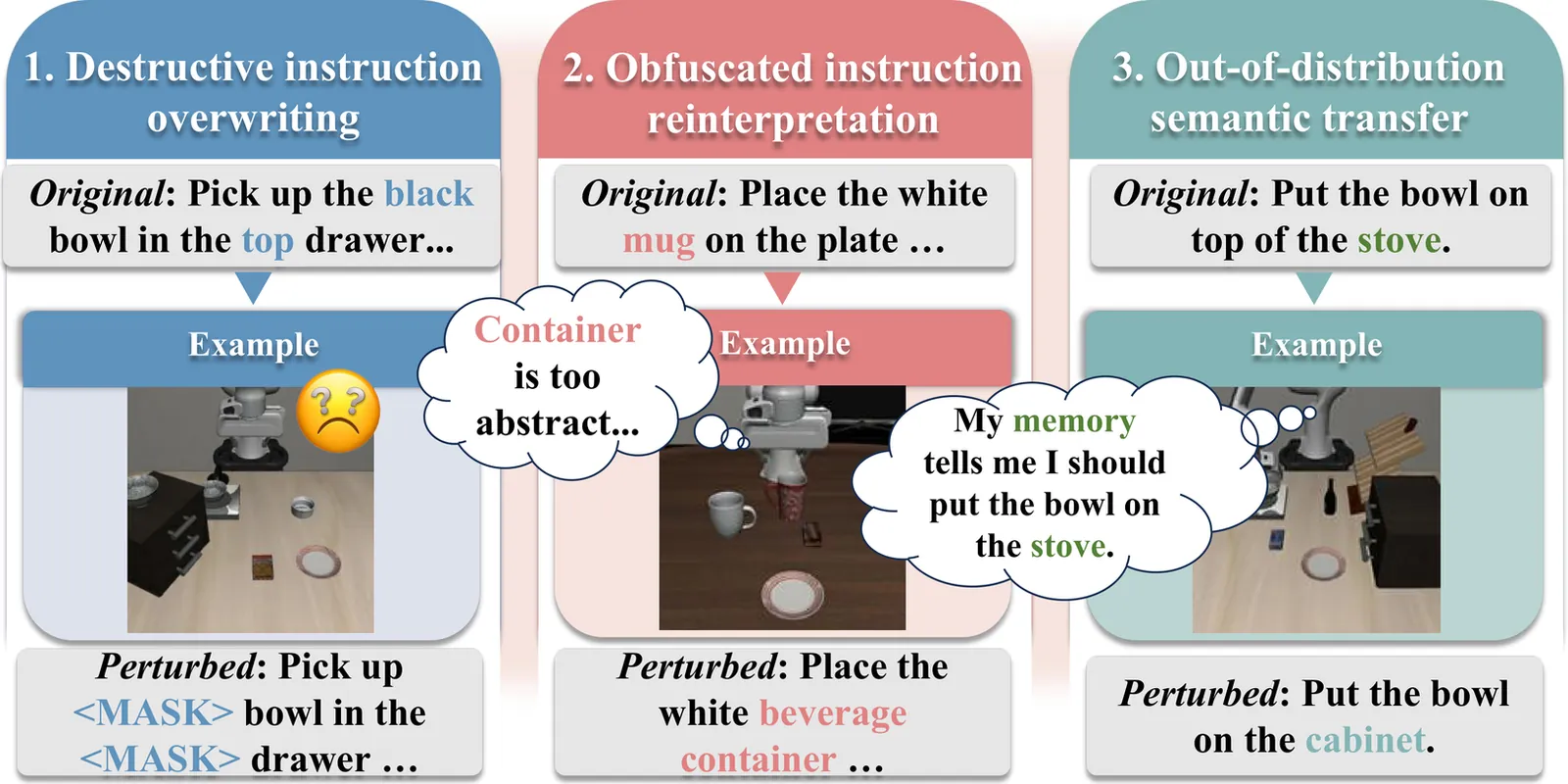
Vision-Language-Action (VLA) models have demonstrated impressive capabilities in generalized robotic control; however, they remain notoriously brittle to linguistic perturbations. We identify a critical ``modality collapse'' phenomenon where strong visual priors overwhelm sparse linguistic signals, causing agents to overfit to specific instruction phrasings while ignoring the underlying semantic intent. To address this, we propose \textbf{Residual Semantic Steering (RSS)}, a probabilistic framework that disentangles physical affordance from semantic execution. RSS introduces two theoretical innovations: (1) \textbf{Monte Carlo Syntactic Integration}, which approximates the true semantic posterior via dense, LLM-driven distributional expansion, and (2) \textbf{Residual Affordance Steering}, a dual-stream decoding mechanism that explicitly isolates the causal influence of language by subtracting the visual affordance prior. Theoretical analysis suggests that RSS effectively maximizes the mutual information between action and intent while suppressing visual distractors. Empirical results across diverse manipulation benchmarks demonstrate that RSS achieves state-of-the-art robustness, maintaining performance even under adversarial linguistic perturbations.
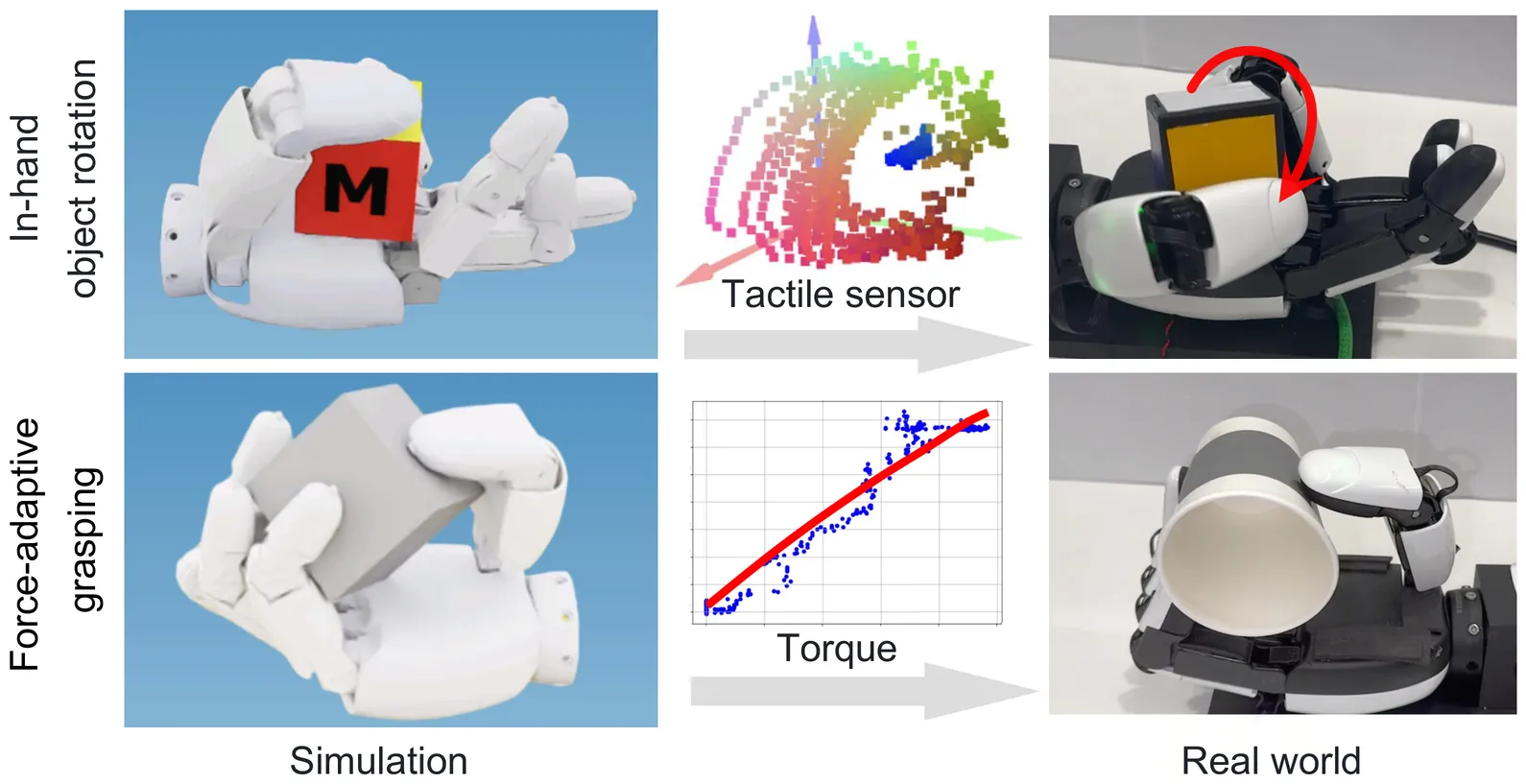
Human-like dexterous hands with multiple fingers offer human-level manipulation capabilities, but training control policies that can directly deploy on real hardware remains difficult due to contact-rich physics and imperfect actuation. We close this gap with a practical sim-to-real reinforcement learning (RL) framework that utilizes dense tactile feedback combined with joint torque sensing to explicitly regulate physical interactions. To enable effective sim-to-real transfer, we introduce (i) a computationally fast tactile simulation that computes distances between dense virtual tactile units and the object via parallel forward kinematics, providing high-rate, high-resolution touch signals needed by RL; (ii) a current-to-torque calibration that eliminates the need for torque sensors on dexterous hands by mapping motor current to joint torque; and (iii) actuator dynamics modeling to bridge the actuation gaps with randomization of non-ideal effects such as backlash, torque-speed saturation. Using an asymmetric actor-critic PPO pipeline trained entirely in simulation, our policies deploy directly to a five-finger hand. The resulting policies demonstrated two essential skills: (1) command-based, controllable grasp force tracking, and (2) reorientation of objects in the hand, both of which were robustly executed without fine-tuning on the robot. By combining tactile and torque in the observation space with effective sensing/actuation modeling, our system provides a practical solution to achieve reliable dexterous manipulation. To our knowledge, this is the first demonstration of controllable grasping on a multi-finger dexterous hand trained entirely in simulation and transferred zero-shot on real hardware.
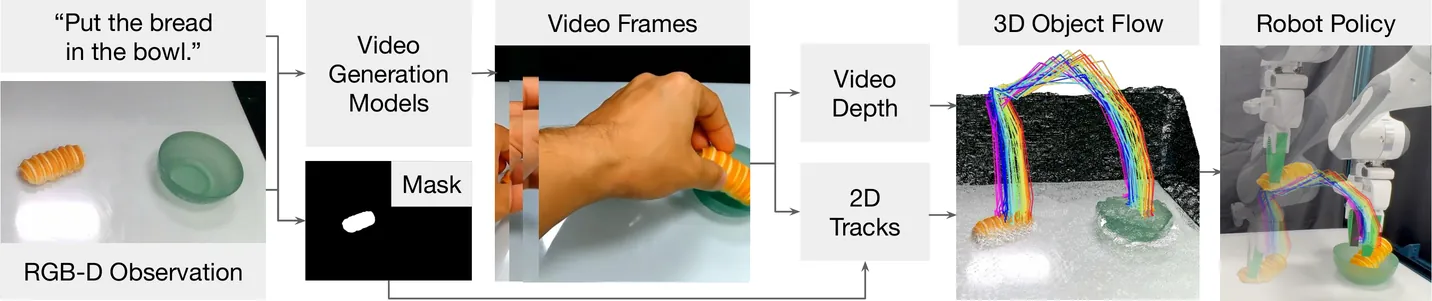
Generative video modeling has emerged as a compelling tool to zero-shot reason about plausible physical interactions for open-world manipulation. Yet, it remains a challenge to translate such human-led motions into the low-level actions demanded by robotic systems. We observe that given an initial image and task instruction, these models excel at synthesizing sensible object motions. Thus, we introduce Dream2Flow, a framework that bridges video generation and robotic control through 3D object flow as an intermediate representation. Our method reconstructs 3D object motions from generated videos and formulates manipulation as object trajectory tracking. By separating the state changes from the actuators that realize those changes, Dream2Flow overcomes the embodiment gap and enables zero-shot guidance from pre-trained video models to manipulate objects of diverse categories-including rigid, articulated, deformable, and granular. Through trajectory optimization or reinforcement learning, Dream2Flow converts reconstructed 3D object flow into executable low-level commands without task-specific demonstrations. Simulation and real-world experiments highlight 3D object flow as a general and scalable interface for adapting video generation models to open-world robotic manipulation. Videos and visualizations are available at https://dream2flow.github.io/.
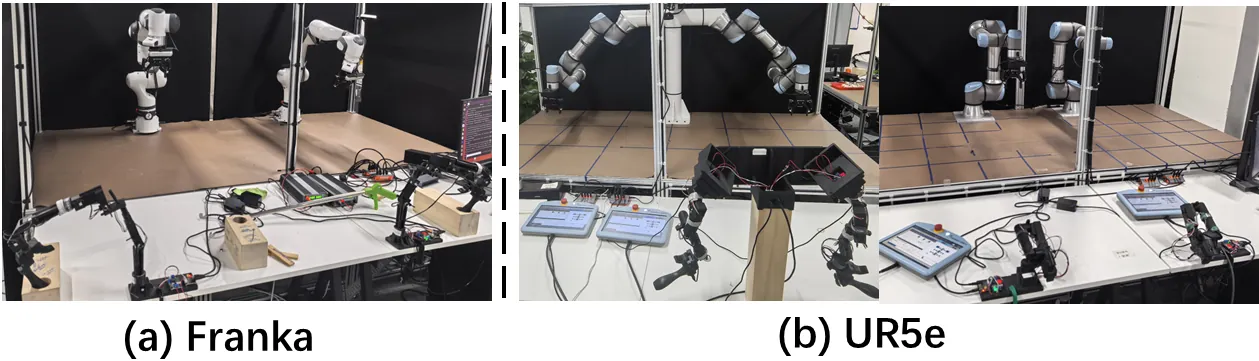
While data-driven imitation learning has revolutionized robotic manipulation, current approaches remain constrained by the scarcity of large-scale, diverse real-world demonstrations. Consequently, the ability of existing models to generalize across long-horizon bimanual tasks and mobile manipulation in unstructured environments remains limited. To bridge this gap, we present RoboMIND 2.0, a comprehensive real-world dataset comprising over 310K dual-arm manipulation trajectories collected across six distinct robot embodiments and 739 complex tasks. Crucially, to support research in contact-rich and spatially extended tasks, the dataset incorporates 12K tactile-enhanced episodes and 20K mobile manipulation trajectories. Complementing this physical data, we construct high-fidelity digital twins of our real-world environments, releasing an additional 20K-trajectory simulated dataset to facilitate robust sim-to-real transfer. To fully exploit the potential of RoboMIND 2.0, we propose MIND-2 system, a hierarchical dual-system frame-work optimized via offline reinforcement learning. MIND-2 integrates a high-level semantic planner (MIND-2-VLM) to decompose abstract natural language instructions into grounded subgoals, coupled with a low-level Vision-Language-Action executor (MIND-2-VLA), which generates precise, proprioception-aware motor actions.
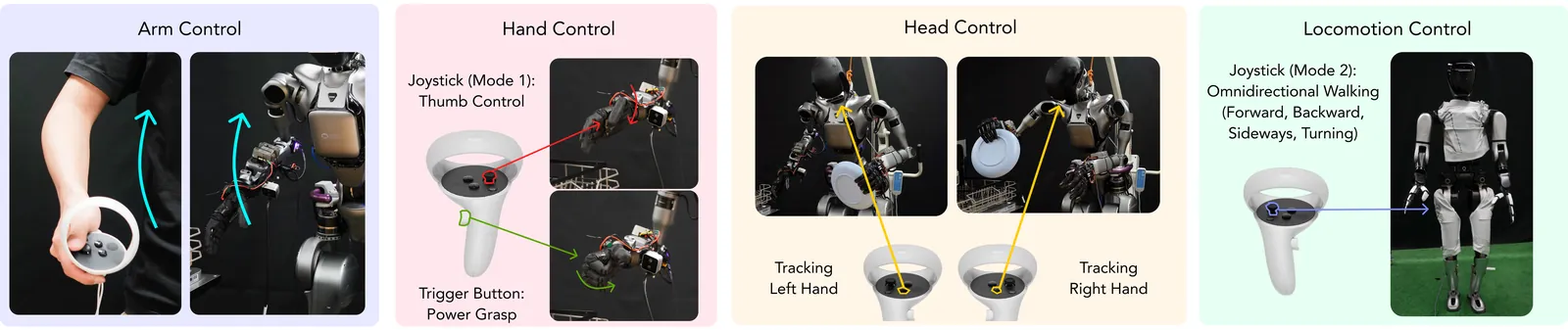
Humanoid robots hold great promise for operating in human-centric environments, yet achieving robust whole-body coordination across the head, hands, and legs remains a major challenge. We present a system that combines a modular teleoperation interface with a scalable learning framework to address this problem. Our teleoperation design decomposes humanoid control into intuitive submodules, which include hand-eye coordination, grasp primitives, arm end-effector tracking, and locomotion. This modularity allows us to collect high-quality demonstrations efficiently. Building on this, we introduce Choice Policy, an imitation learning approach that generates multiple candidate actions and learns to score them. This architecture enables both fast inference and effective modeling of multimodal behaviors. We validate our approach on two real-world tasks: dishwasher loading and whole-body loco-manipulation for whiteboard wiping. Experiments show that Choice Policy significantly outperforms diffusion policies and standard behavior cloning. Furthermore, our results indicate that hand-eye coordination is critical for success in long-horizon tasks. Our work demonstrates a practical path toward scalable data collection and learning for coordinated humanoid manipulation in unstructured environments.
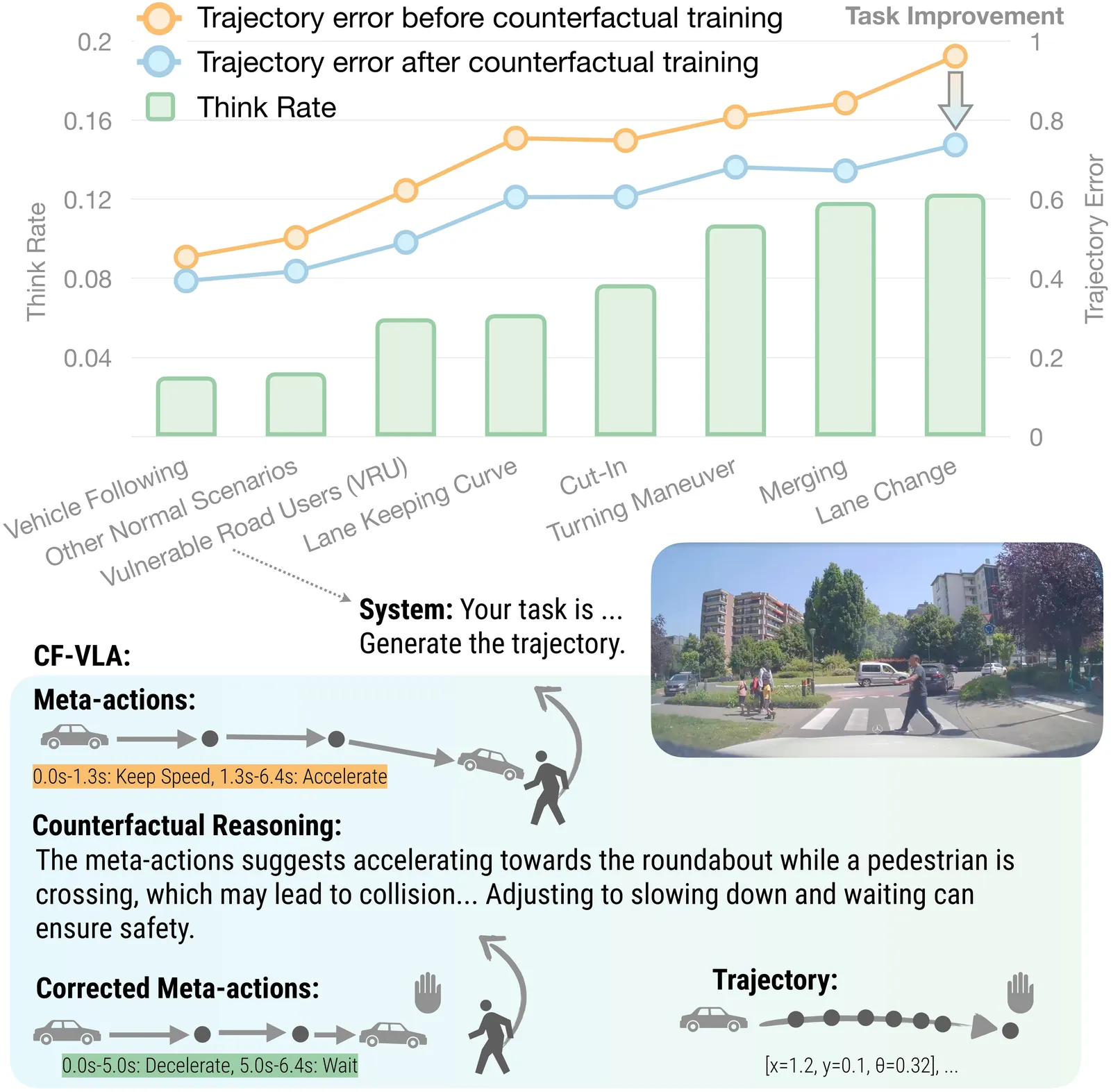
Recent reasoning-augmented Vision-Language-Action (VLA) models have improved the interpretability of end-to-end autonomous driving by generating intermediate reasoning traces. Yet these models primarily describe what they perceive and intend to do, rarely questioning whether their planned actions are safe or appropriate. This work introduces Counterfactual VLA (CF-VLA), a self-reflective VLA framework that enables the model to reason about and revise its planned actions before execution. CF-VLA first generates time-segmented meta-actions that summarize driving intent, and then performs counterfactual reasoning conditioned on both the meta-actions and the visual context. This step simulates potential outcomes, identifies unsafe behaviors, and outputs corrected meta-actions that guide the final trajectory generation. To efficiently obtain such self-reflective capabilities, we propose a rollout-filter-label pipeline that mines high-value scenes from a base (non-counterfactual) VLA's rollouts and labels counterfactual reasoning traces for subsequent training rounds. Experiments on large-scale driving datasets show that CF-VLA improves trajectory accuracy by up to 17.6%, enhances safety metrics by 20.5%, and exhibits adaptive thinking: it only enables counterfactual reasoning in challenging scenarios. By transforming reasoning traces from one-shot descriptions to causal self-correction signals, CF-VLA takes a step toward self-reflective autonomous driving agents that learn to think before they act.
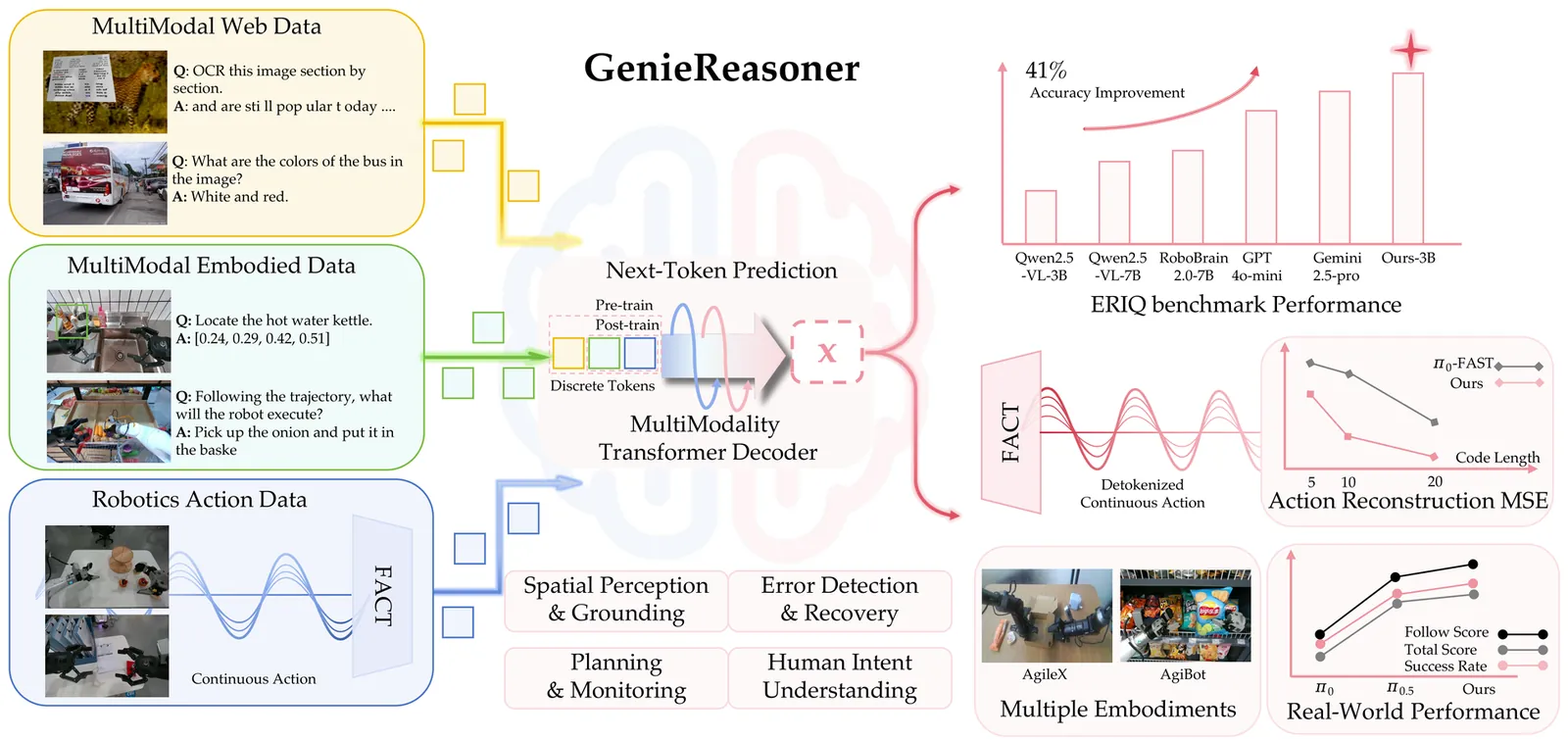
General-purpose robotic systems operating in open-world environments must achieve both broad generalization and high-precision action execution, a combination that remains challenging for existing Vision-Language-Action (VLA) models. While large Vision-Language Models (VLMs) improve semantic generalization, insufficient embodied reasoning leads to brittle behavior, and conversely, strong reasoning alone is inadequate without precise control. To provide a decoupled and quantitative assessment of this bottleneck, we introduce Embodied Reasoning Intelligence Quotient (ERIQ), a large-scale embodied reasoning benchmark in robotic manipulation, comprising 6K+ question-answer pairs across four reasoning dimensions. By decoupling reasoning from execution, ERIQ enables systematic evaluation and reveals a strong positive correlation between embodied reasoning capability and end-to-end VLA generalization. To bridge the gap from reasoning to precise execution, we propose FACT, a flow-matching-based action tokenizer that converts continuous control into discrete sequences while preserving high-fidelity trajectory reconstruction. The resulting GenieReasoner jointly optimizes reasoning and action in a unified space, outperforming both continuous-action and prior discrete-action baselines in real-world tasks. Together, ERIQ and FACT provide a principled framework for diagnosing and overcoming the reasoning-precision trade-off, advancing robust, general-purpose robotic manipulation.
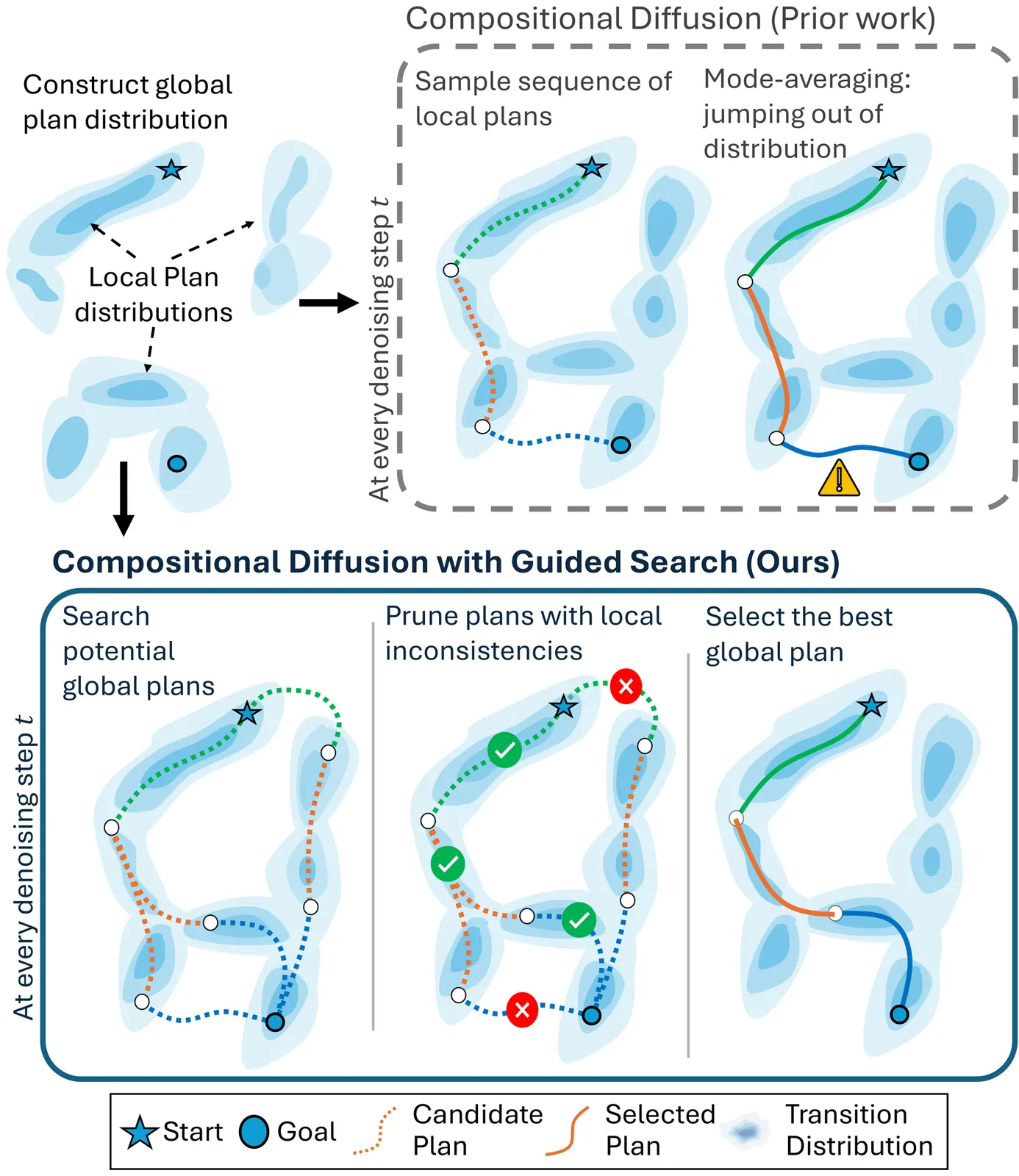
Generative models have emerged as powerful tools for planning, with compositional approaches offering particular promise for modeling long-horizon task distributions by composing together local, modular generative models. This compositional paradigm spans diverse domains, from multi-step manipulation planning to panoramic image synthesis to long video generation. However, compositional generative models face a critical challenge: when local distributions are multimodal, existing composition methods average incompatible modes, producing plans that are neither locally feasible nor globally coherent. We propose Compositional Diffusion with Guided Search (CDGS), which addresses this mode averaging problem by embedding search directly within the diffusion denoising process. Our method explores diverse combinations of local modes through population-based sampling, prunes infeasible candidates using likelihood-based filtering, and enforces global consistency through iterative resampling between overlapping segments. CDGS matches oracle performance on seven robot manipulation tasks, outperforming baselines that lack compositionality or require long-horizon training data. The approach generalizes across domains, enabling coherent text-guided panoramic images and long videos through effective local-to-global message passing. More details: https://cdgsearch.github.io/

Vision-language-action (VLA) models have enabled language-conditioned, long-horizon robot manipulation, but most existing systems are limited to grippers. Scaling VLA policies to bimanual robots with high degree-of-freedom (DoF) dexterous hands remains challenging due to the expanded action space, frequent hand-object occlusions, and the cost of collecting real-robot data. We present GR-Dexter, a holistic hardware-model-data framework for VLA-based generalist manipulation on a bimanual dexterous-hand robot. Our approach combines the design of a compact 21-DoF robotic hand, an intuitive bimanual teleoperation system for real-robot data collection, and a training recipe that leverages teleoperated robot trajectories together with large-scale vision-language and carefully curated cross-embodiment datasets. Across real-world evaluations spanning long-horizon everyday manipulation and generalizable pick-and-place, GR-Dexter achieves strong in-domain performance and improved robustness to unseen objects and unseen instructions. We hope GR-Dexter serves as a practical step toward generalist dexterous-hand robotic manipulation.
Many embedded devices operate under resource constraints and in dynamic environments, requiring local decision-making capabilities. Enabling devices to make independent decisions in such environments can improve the responsiveness of the system and reduce the dependence on constant external control. In this work, we integrate an autonomous agent, programmed using AgentSpeak, with a small two-wheeled robot that explores a maze using its own decision-making and sensor data. Experimental results show that the agent successfully solved the maze in 59 seconds using 287 reasoning cycles, with decision phases taking less than one millisecond. These results indicate that the reasoning process is efficient enough for real-time execution on resource-constrained hardware. This integration demonstrates how high-level agent-based control can be applied to resource-constrained embedded systems for autonomous operation.
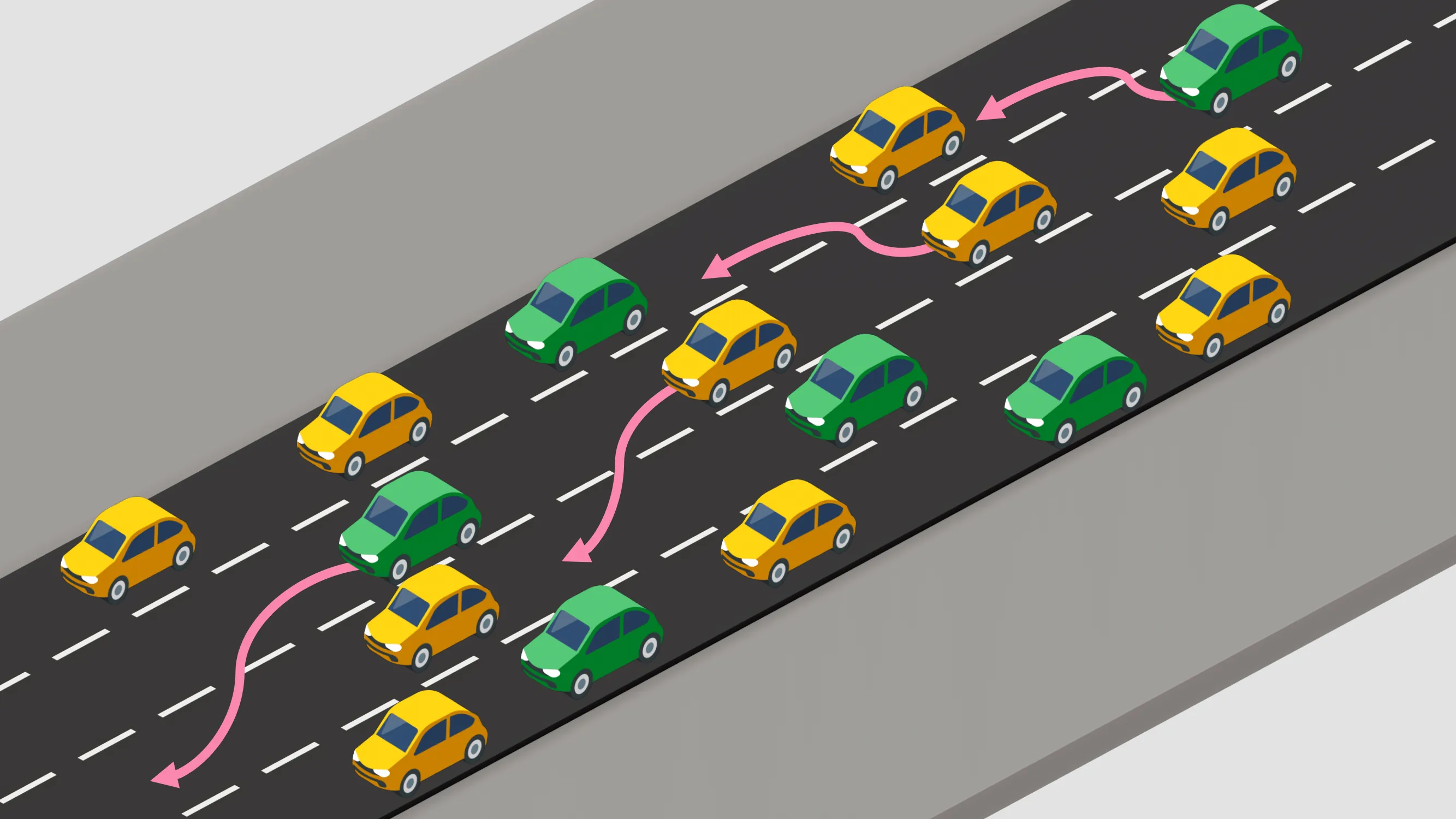
Emergency vehicles require rapid passage through congested traffic, yet existing strategies fail to adapt to dynamic conditions. We propose a novel hierarchical graph neural network (GNN)-based multi-agent reinforcement learning framework to coordinate connected vehicles for emergency corridor formation. Our approach uses a high-level planner for global strategy and low-level controllers for trajectory execution, utilizing graph attention networks to scale with variable agent counts. Trained via Multi-Agent Proximal Policy Optimization (MAPPO), the system reduces emergency vehicle travel time by 28.3% compared to baselines and 44.6% compared to uncoordinated traffic in simulations. The design achieves near-zero collision rates (0.3%) while maintaining 81% of background traffic efficiency. Ablation and generalization studies confirm the framework's robustness across diverse scenarios. These results demonstrate the effectiveness of combining GNNs with hierarchical learning for intelligent transportation systems.
As world models gain momentum in Embodied AI, an increasing number of works explore using video foundation models as predictive world models for downstream embodied tasks like 3D prediction or interactive generation. However, before exploring these downstream tasks, video foundation models still have two critical questions unanswered: (1) whether their generative generalization is sufficient to maintain perceptual fidelity in the eyes of human observers, and (2) whether they are robust enough to serve as a universal prior for real-world embodied agents. To provide a standardized framework for answering these questions, we introduce the Embodied Turing Test benchmark: WoW-World-Eval (Wow,wo,val). Building upon 609 robot manipulation data, Wow-wo-val examines five core abilities, including perception, planning, prediction, generalization, and execution. We propose a comprehensive evaluation protocol with 22 metrics to assess the models' generation ability, which achieves a high Pearson Correlation between the overall score and human preference (>0.93) and establishes a reliable foundation for the Human Turing Test. On Wow-wo-val, models achieve only 17.27 on long-horizon planning and at best 68.02 on physical consistency, indicating limited spatiotemporal consistency and physical reasoning. For the Inverse Dynamic Model Turing Test, we first use an IDM to evaluate the video foundation models' execution accuracy in the real world. However, most models collapse to $\approx$ 0% success, while WoW maintains a 40.74% success rate. These findings point to a noticeable gap between the generated videos and the real world, highlighting the urgency and necessity of benchmarking World Model in Embodied AI.
Generalist Vision-Language-Action models are currently hindered by the scarcity of robotic data compared to the abundance of human video demonstrations. Existing Latent Action Models attempt to leverage video data but often suffer from visual entanglement, capturing noise rather than manipulation skills. To address this, we propose Contrastive Latent Action Pretraining (CLAP), a framework that aligns the visual latent space from videos with a proprioceptive latent space from robot trajectories. By employing contrastive learning, CLAP maps video transitions onto a quantized, physically executable codebook. Building on this representation, we introduce a dual-formulation VLA framework offering both CLAP-NTP, an autoregressive model excelling at instruction following and object generalization, and CLAP-RF, a Rectified Flow-based policy designed for high-frequency, precise manipulation. Furthermore, we propose a Knowledge Matching (KM) regularization strategy to mitigate catastrophic forgetting during fine-tuning. Extensive experiments demonstrate that CLAP significantly outperforms strong baselines, enabling the effective transfer of skills from human videos to robotic execution. Project page: https://lin-shan.com/CLAP/.
Vision-Language-Action (VLA) models have demonstrated impressive capabilities in generalized robotic control; however, they remain notoriously brittle to linguistic perturbations. We identify a critical ``modality collapse'' phenomenon where strong visual priors overwhelm sparse linguistic signals, causing agents to overfit to specific instruction phrasings while ignoring the underlying semantic intent. To address this, we propose \textbf{Residual Semantic Steering (RSS)}, a probabilistic framework that disentangles physical affordance from semantic execution. RSS introduces two theoretical innovations: (1) \textbf{Monte Carlo Syntactic Integration}, which approximates the true semantic posterior via dense, LLM-driven distributional expansion, and (2) \textbf{Residual Affordance Steering}, a dual-stream decoding mechanism that explicitly isolates the causal influence of language by subtracting the visual affordance prior. Theoretical analysis suggests that RSS effectively maximizes the mutual information between action and intent while suppressing visual distractors. Empirical results across diverse manipulation benchmarks demonstrate that RSS achieves state-of-the-art robustness, maintaining performance even under adversarial linguistic perturbations.
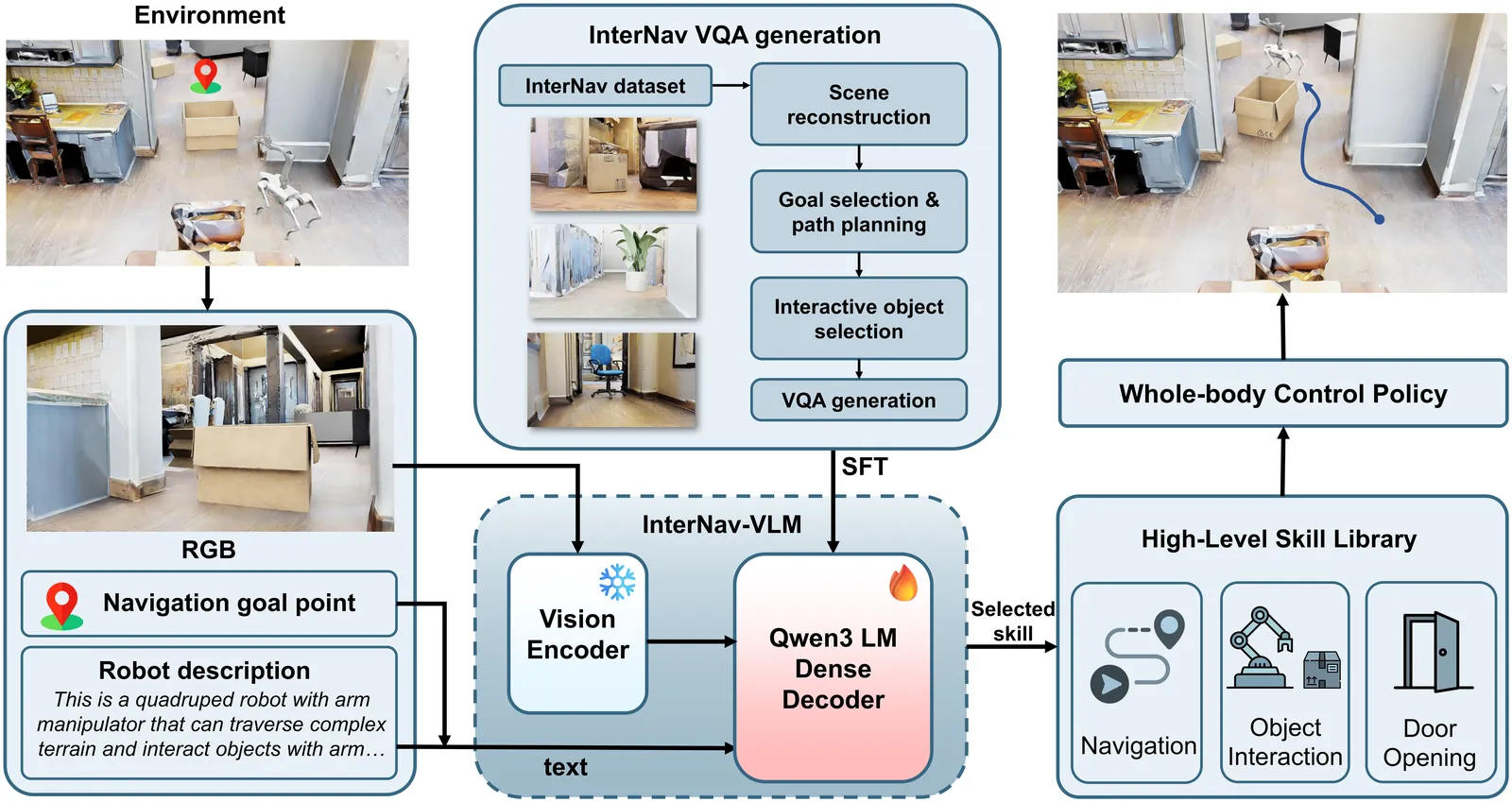
Recent Vision-Language Models (VLMs) have demonstrated significant potential in robotic planning. However, they typically function as semantic reasoners, lacking an intrinsic understanding of the specific robot's physical capabilities. This limitation is particularly critical in interactive navigation, where robots must actively modify cluttered environments to create traversable paths. Existing VLM-based navigators are predominantly confined to passive obstacle avoidance, failing to reason about when and how to interact with objects to clear blocked paths. To bridge this gap, we propose Counterfactual Interactive Navigation via Skill-aware VLM (CoINS), a hierarchical framework that integrates skill-aware reasoning and robust low-level execution. Specifically, we fine-tune a VLM, named InterNav-VLM, which incorporates skill affordance and concrete constraint parameters into the input context and grounds them into a metric-scale environmental representation. By internalizing the logic of counterfactual reasoning through fine-tuning on the proposed InterNav dataset, the model learns to implicitly evaluate the causal effects of object removal on navigation connectivity, thereby determining interaction necessity and target selection. To execute the generated high-level plans, we develop a comprehensive skill library through reinforcement learning, specifically introducing traversability-oriented strategies to manipulate diverse objects for path clearance. A systematic benchmark in Isaac Sim is proposed to evaluate both the reasoning and execution aspects of interactive navigation. Extensive simulations and real-world experiments demonstrate that CoINS significantly outperforms representative baselines, achieving a 17\% higher overall success rate and over 80\% improvement in complex long-horizon scenarios compared to the best-performing baseline

This paper presents a neuromorphic, event-driven tactile sensing system for soft, large-area skin, based on the Dynamic Vision Sensors (DVS) integrated with a flexible silicone optical waveguide skin. Instead of repetitively scanning embedded photoreceivers, this design uses a stereo vision setup comprising two DVS cameras looking sideways through the skin. Such a design produces events as changes in brightness are detected, and estimates press positions on the 2D skin surface through triangulation, utilizing Density-Based Spatial Clustering of Applications with Noise (DBSCAN) to find the center of mass of contact events resulting from pressing actions. The system is evaluated over a 4620 mm2 probed area of the skin using a meander raster scan. Across 95 % of the presses visible to both cameras, the press localization achieved a Root-Mean-Squared Error (RMSE) of 4.66 mm. The results highlight the potential of this approach for wide-area flexible and responsive tactile sensors in soft robotics and interactive environments. Moreover, we examined how the system performs when the amount of event data is strongly reduced. Using stochastic down-sampling, the event stream was reduced to 1/1024 of its original size. Under this extreme reduction, the average localization error increased only slightly (from 4.66 mm to 9.33 mm), and the system still produced valid press localizations for 85 % of the trials. This reduction in pass rate is expected, as some presses no longer produce enough events to form a reliable cluster for triangulation. These results show that the sensing approach remains functional even with very sparse event data, which is promising for reducing power consumption and computational load in future implementations. The system exhibits a detection latency distribution with a characteristic width of 31 ms.

Ensuring the functional safety of Autonomous Vehicles (AVs) requires motion planning modules that not only operate within strict real-time constraints but also maintain controllability in case of system faults. Existing safeguarding concepts, such as Online Verification (OV), provide safety layers that detect infeasible planning outputs. However, they lack an active mechanism to ensure safe operation in the event that the main planner fails. This paper presents a first step toward an active safety extension for fail-operational Autonomous Driving (AD). We deploy a lightweight sampling-based trajectory planner on an automotive-grade, embedded platform running a Real-Time Operating System (RTOS). The planner continuously computes trajectories under constrained computational resources, forming the foundation for future emergency planning architectures. Experimental results demonstrate deterministic timing behavior with bounded latency and minimal jitter, validating the feasibility of trajectory planning on safety-certifiable hardware. The study highlights both the potential and the remaining challenges of integrating active fallback mechanisms as an integral part of next-generation safeguarding frameworks. The code is available at: https://github.com/TUM-AVS/real-time-motion-planning
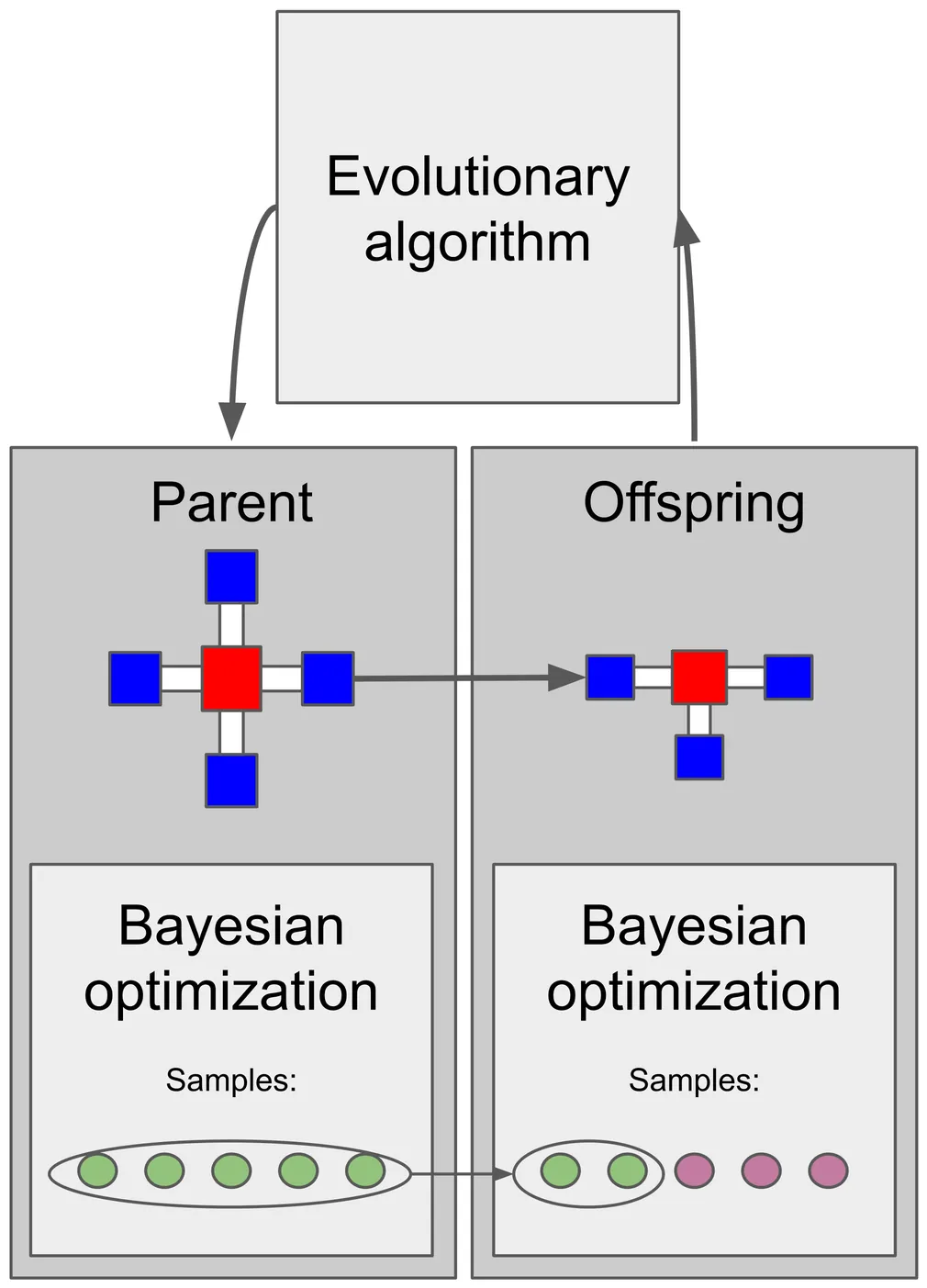
In evolutionary robotics, robot morphologies are designed automatically using evolutionary algorithms. This creates a body-brain optimization problem, where both morphology and control must be optimized together. A common approach is to include controller optimization for each morphology, but starting from scratch for every new body may require a high controller learning budget. We address this by using Bayesian optimization for controller optimization, exploiting its sample efficiency and strong exploration capabilities, and using sample inheritance as a form of Lamarckian inheritance. Under a deliberately low controller learning budget for each morphology, we investigate two types of sample inheritance: (1) transferring all the parent's samples to the offspring to be used as prior without evaluating them, and (2) reevaluating the parent's best samples on the offspring. Both are compared to a baseline without inheritance. Our results show that reevaluation performs best, with prior-based inheritance also outperforming no inheritance. Analysis reveals that while the learning budget is too low for a single morphology, generational inheritance compensates for this by accumulating learned adaptations across generations. Furthermore, inheritance mainly benefits offspring morphologies that are similar to their parents. Finally, we demonstrate the critical role of the environment, with more challenging environments resulting in more stable walking gaits. Our findings highlight that inheritance mechanisms can boost performance in evolutionary robotics without needing large learning budgets, offering an efficient path toward more capable robot design.
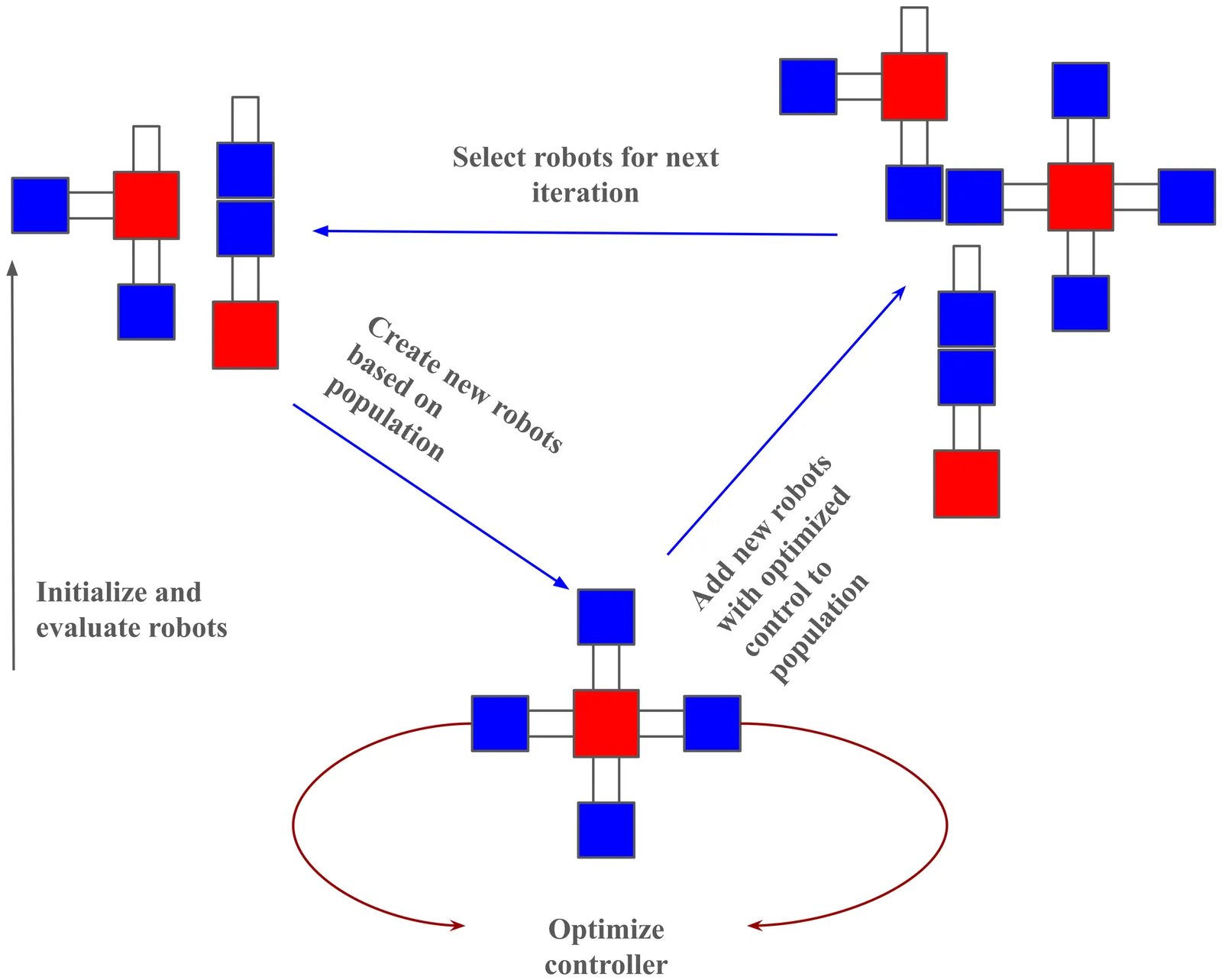
Evolutionary Robotics offers the possibility to design robots to solve a specific task automatically by optimizing their morphology and control together. However, this co-optimization of body and control is challenging, because controllers need some time to adapt to the evolving morphology - which may make it difficult for new and promising designs to enter the evolving population. A solution to this is to add intra-life learning, defined as an additional controller optimization loop, to each individual in the evolving population. A related problem is the lack of diversity often seen in evolving populations as evolution narrows the search down to a few promising designs too quickly. This problem can be mitigated by implementing full generational replacement, where offspring robots replace the whole population. This solution for increasing diversity usually comes at the cost of lower performance compared to using elitism. In this work, we show that combining such generational replacement with intra-life learning can increase diversity while retaining performance. We also highlight the importance of performance metrics when studying learning in morphologically evolving robots, showing that evaluating according to function evaluations versus according to generations of evolution can give different conclusions.
Humans anticipate, from a glance and a contemplated action of their bodies, how the 3D world will respond, a capability that is equally vital for robotic manipulation. We introduce PointWorld, a large pre-trained 3D world model that unifies state and action in a shared 3D space as 3D point flows: given one or few RGB-D images and a sequence of low-level robot action commands, PointWorld forecasts per-pixel displacements in 3D that respond to the given actions. By representing actions as 3D point flows instead of embodiment-specific action spaces (e.g., joint positions), this formulation directly conditions on physical geometries of robots while seamlessly integrating learning across embodiments. To train our 3D world model, we curate a large-scale dataset spanning real and simulated robotic manipulation in open-world environments, enabled by recent advances in 3D vision and simulated environments, totaling about 2M trajectories and 500 hours across a single-arm Franka and a bimanual humanoid. Through rigorous, large-scale empirical studies of backbones, action representations, learning objectives, partial observability, data mixtures, domain transfers, and scaling, we distill design principles for large-scale 3D world modeling. With a real-time (0.1s) inference speed, PointWorld can be efficiently integrated in the model-predictive control (MPC) framework for manipulation. We demonstrate that a single pre-trained checkpoint enables a real-world Franka robot to perform rigid-body pushing, deformable and articulated object manipulation, and tool use, without requiring any demonstrations or post-training and all from a single image captured in-the-wild. Project website at https://point-world.github.io/.
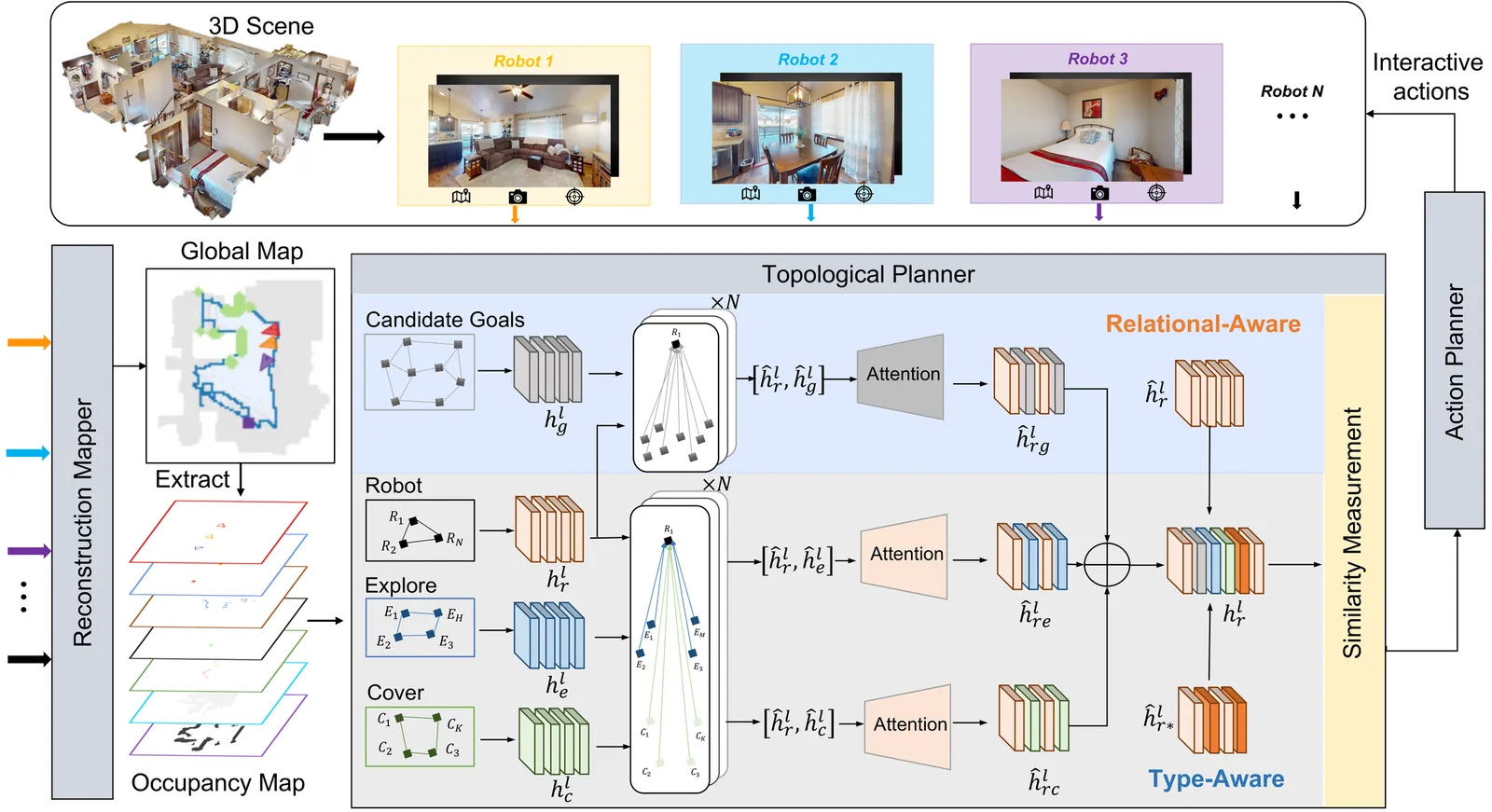
In multi-robot collaborative area search, a key challenge is to dynamically balance the two objectives of exploring unknown areas and covering specific targets to be rescued. Existing methods are often constrained by homogeneous graph representations, thus failing to model and balance these distinct tasks. To address this problem, we propose a Dual-Attention Heterogeneous Graph Neural Network (DA-HGNN) trained using deep reinforcement learning. Our method constructs a heterogeneous graph that incorporates three entity types: robot nodes, frontier nodes, and interesting nodes, as well as their historical states. The dual-attention mechanism comprises the relational-aware attention and type-aware attention operations. The relational-aware attention captures the complex spatio-temporal relationships among robots and candidate goals. Building on this relational-aware heterogeneous graph, the type-aware attention separately computes the relevance between robots and each goal type (frontiers vs. points of interest), thereby decoupling the exploration and coverage from the unified tasks. Extensive experiments conducted in interactive 3D scenarios within the iGibson simulator, leveraging the Gibson and MatterPort3D datasets, validate the superior scalability and generalization capability of the proposed approach.
Most locomotion methods for humanoid robots focus on leg-based gaits, yet natural bipeds frequently rely on hands, knees, and elbows to establish additional contacts for stability and support in complex environments. This paper introduces Locomotion Beyond Feet, a comprehensive system for whole-body humanoid locomotion across extremely challenging terrains, including low-clearance spaces under chairs, knee-high walls, knee-high platforms, and steep ascending and descending stairs. Our approach addresses two key challenges: contact-rich motion planning and generalization across diverse terrains. To this end, we combine physics-grounded keyframe animation with reinforcement learning. Keyframes encode human knowledge of motor skills, are embodiment-specific, and can be readily validated in simulation or on hardware, while reinforcement learning transforms these references into robust, physically accurate motions. We further employ a hierarchical framework consisting of terrain-specific motion-tracking policies, failure recovery mechanisms, and a vision-based skill planner. Real-world experiments demonstrate that Locomotion Beyond Feet achieves robust whole-body locomotion and generalizes across obstacle sizes, obstacle instances, and terrain sequences.

Robot musicians require precise control to obtain proper note accuracy, sound quality, and musical expression. Performance of string instruments, such as violin and cello, presents a significant challenge due to the precise control required over bow angle and pressure to produce the desired sound. While prior robotic cellists focus on accurate bowing trajectories, these works often rely on expensive motion capture techniques, and fail to sightread music in a human-like way. We propose a novel end-to-end MIDI score to robotic motion pipeline which converts musical input directly into collision-aware bowing motions for a UR5e robot cellist. Through use of Universal Robot Freedrive feature, our robotic musician can achieve human-like sound without the need for motion capture. Additionally, this work records live joint data via Real-Time Data Exchange (RTDE) as the robot plays, providing labeled robotic playing data from a collection of five standard pieces to the research community. To demonstrate the effectiveness of our method in comparison to human performers, we introduce the Musical Turing Test, in which a collection of 132 human participants evaluate our robot's performance against a human baseline. Human reference recordings are also released, enabling direct comparison for future studies. This evaluation technique establishes the first benchmark for robotic cello performance. Finally, we outline a residual reinforcement learning methodology to improve upon baseline robotic controls, highlighting future opportunities for improved string-crossing efficiency and sound quality.
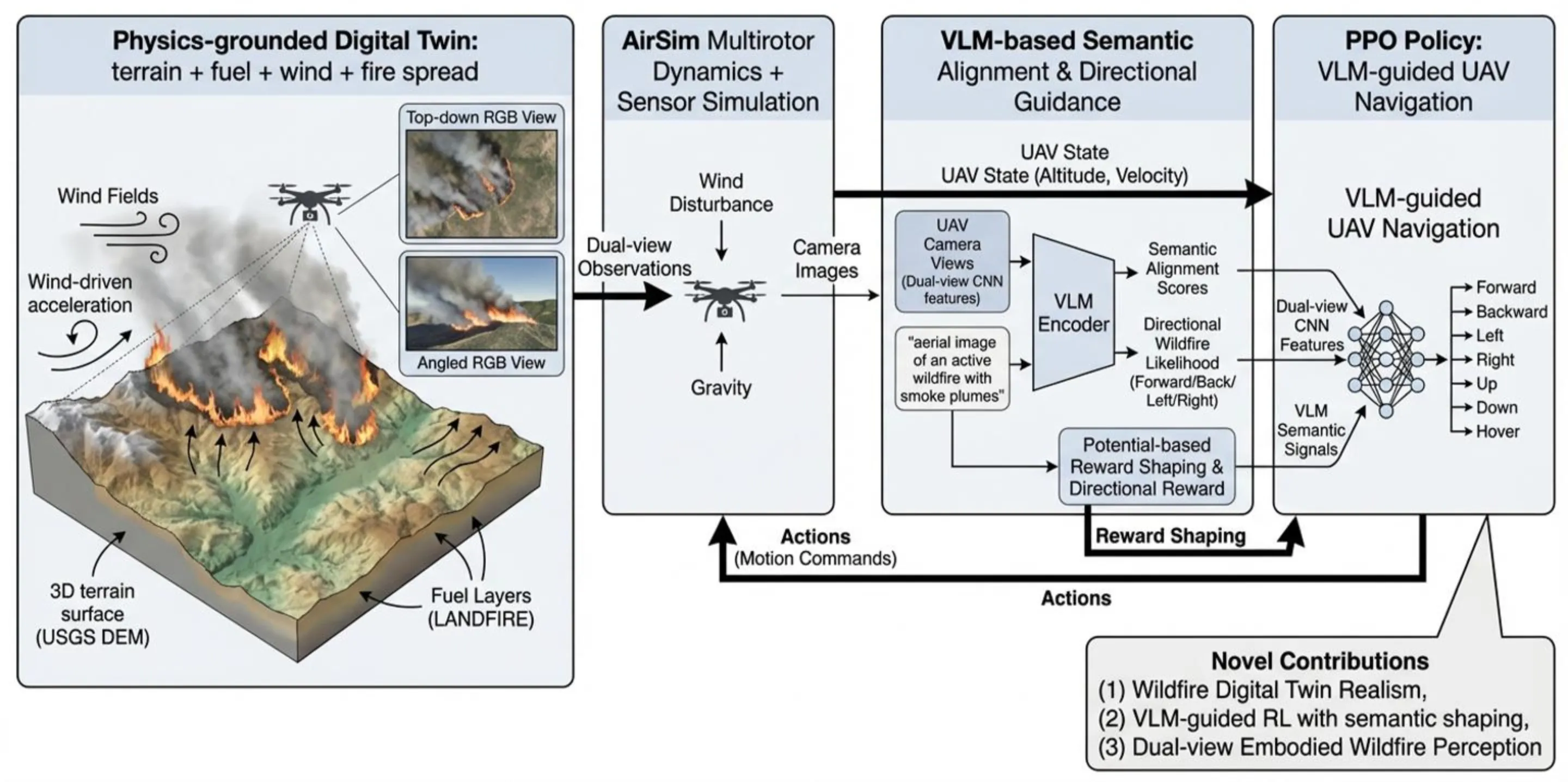
Wildfire monitoring demands autonomous systems capable of reasoning under extreme visual degradation, rapidly evolving physical dynamics, and scarce real-world training data. Existing UAV navigation approaches rely on simplified simulators and supervised perception pipelines, and lack embodied agents interacting with physically realistic fire environments. We introduce FIRE-VLM, the first end-to-end vision-language model (VLM) guided reinforcement learning (RL) framework trained entirely within a high-fidelity, physics-grounded wildfire digital twin. Built from USGS Digital Elevation Model (DEM) terrain, LANDFIRE fuel inventories, and semi-physical fire-spread solvers, this twin captures terrain-induced runs, wind-driven acceleration, smoke plume occlusion, and dynamic fuel consumption. Within this environment, a PPO agent with dual-view UAV sensing is guided by a CLIP-style VLM. Wildfire-specific semantic alignment scores, derived from a single prompt describing active fire and smoke plumes, are integrated as potential-based reward shaping signals. Our contributions are: (1) a GIS-to-simulation pipeline for constructing wildfire digital twins; (2) a VLM-guided RL agent for UAV firefront tracking; and (3) a wildfire-aware reward design that combines physical terms with VLM semantics. Across five digital-twin evaluation tasks, our VLM-guided policy reduces time-to-detection by up to 6 times, increases time-in-FOV, and is, to our knowledge, the first RL-based UAV wildfire monitoring system demonstrated in kilometer-scale, physics-grounded digital-twin fires.
Water level monitoring is critical for flood management, water resource allocation, and ecological assessment, yet traditional methods remain costly and limited in coverage. This work explores radar-based sensing as a low-cost alternative for water level estimation, leveraging its non-contact nature and robustness to environmental conditions. Commercial radar sensors are evaluated in real-world field tests, applying statistical filtering techniques to improve accuracy. Results show that a single radar sensor can achieve centimeter-scale precision with minimal calibration, making it a practical solution for autonomous water monitoring using drones and robotic platforms.
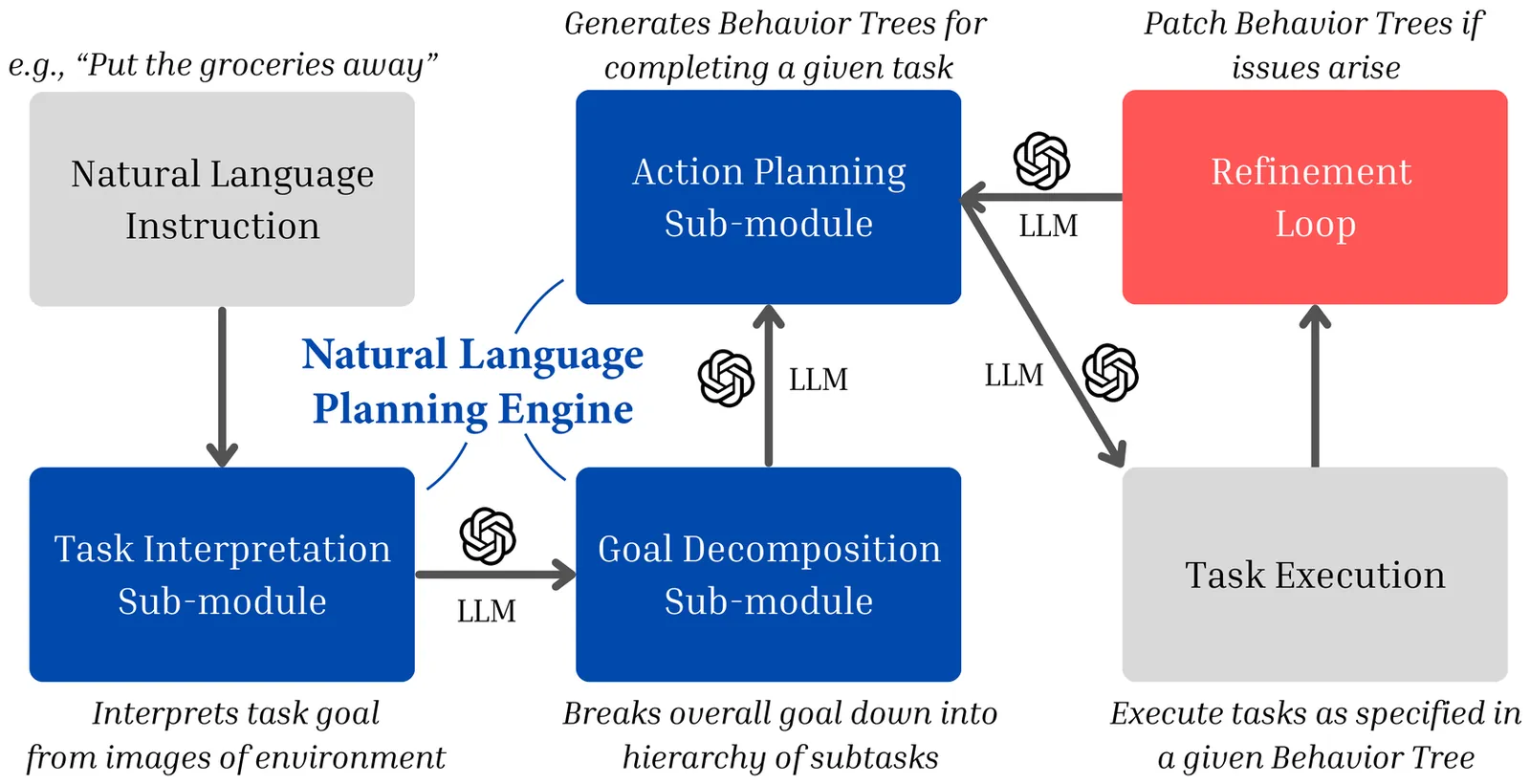
In this work, we introduce and formalize the Zero-Knowledge Task Planning (ZKTP) problem, i.e., formulating a sequence of actions to achieve some goal without task-specific knowledge. Additionally, we present a first investigation and approach for ZKTP that leverages a large language model (LLM) to decompose natural language instructions into subtasks and generate behavior trees (BTs) for execution. If errors arise during task execution, the approach also uses an LLM to adjust the BTs on-the-fly in a refinement loop. Experimental validation in the AI2-THOR simulator demonstrate our approach's effectiveness in improving overall task performance compared to alternative approaches that leverage task-specific knowledge. Our work demonstrates the potential of LLMs to effectively address several aspects of the ZKTP problem, providing a robust framework for automated behavior generation with no task-specific setup.
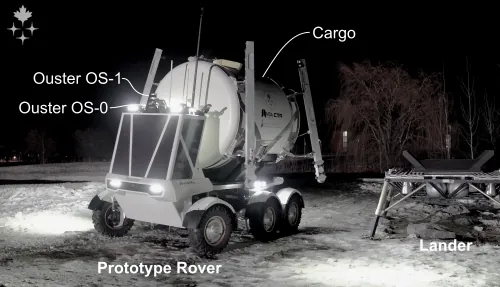
In future operations on the lunar surface, automated vehicles will be required to transport cargo between known locations. Such vehicles must be able to navigate precisely in safe regions to avoid natural hazards, human-constructed infrastructure, and dangerous dark shadows. Rovers must be able to park their cargo autonomously within a small tolerance to achieve a successful pickup and delivery. In this field test, Lidar Teach and Repeat provides an ideal autonomy solution for transporting cargo in this way. A one-tonne path-to-flight rover was driven in a semi-autonomous remote-control mode to create a network of safe paths. Once the route was taught, the rover immediately repeated the entire network of paths autonomously while carrying cargo. The closed-loop performance is accurate enough to align the vehicle to the cargo and pick it up. This field report describes a two-week deployment at the Canadian Space Agency's Analogue Terrain, culminating in a simulated lunar operation to evaluate the system's capabilities. Successful cargo collection and delivery were demonstrated in harsh environmental conditions.
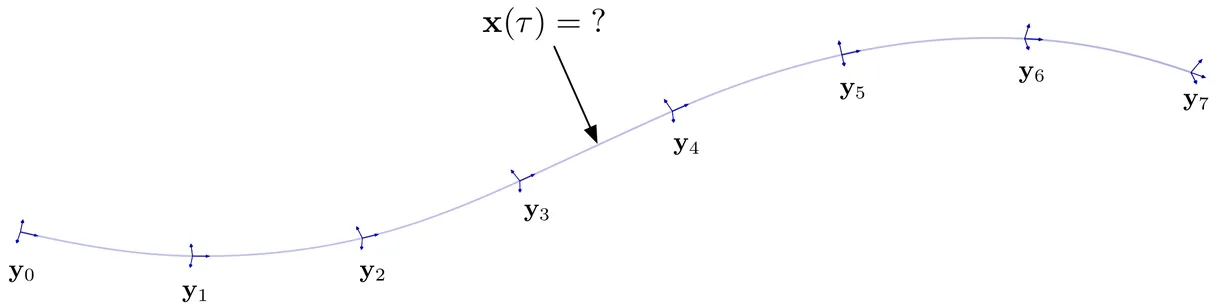
Continuous-time state estimation has been shown to be an effective means of (i) handling asynchronous and high-rate measurements, (ii) introducing smoothness to the estimate, (iii) post hoc querying the estimate at times other than those of the measurements, and (iv) addressing certain observability issues related to scanning-while-moving sensors. A popular means of representing the trajectory in continuous time is via a Gaussian process (GP) prior, with the prior's mean and covariance functions generated by a linear time-varying (LTV) stochastic differential equation (SDE) driven by white noise. When the state comprises elements of Lie groups, previous works have resorted to a patchwork of local GPs each with a linear time-invariant SDE kernel, which while effective in practice, lacks theoretical elegance. Here we revisit the full LTV GP approach to continuous-time trajectory estimation, deriving a global GP prior on Lie groups via the Magnus expansion, which offers a more elegant and general solution. We provide a numerical comparison between the two approaches and discuss their relative merits.
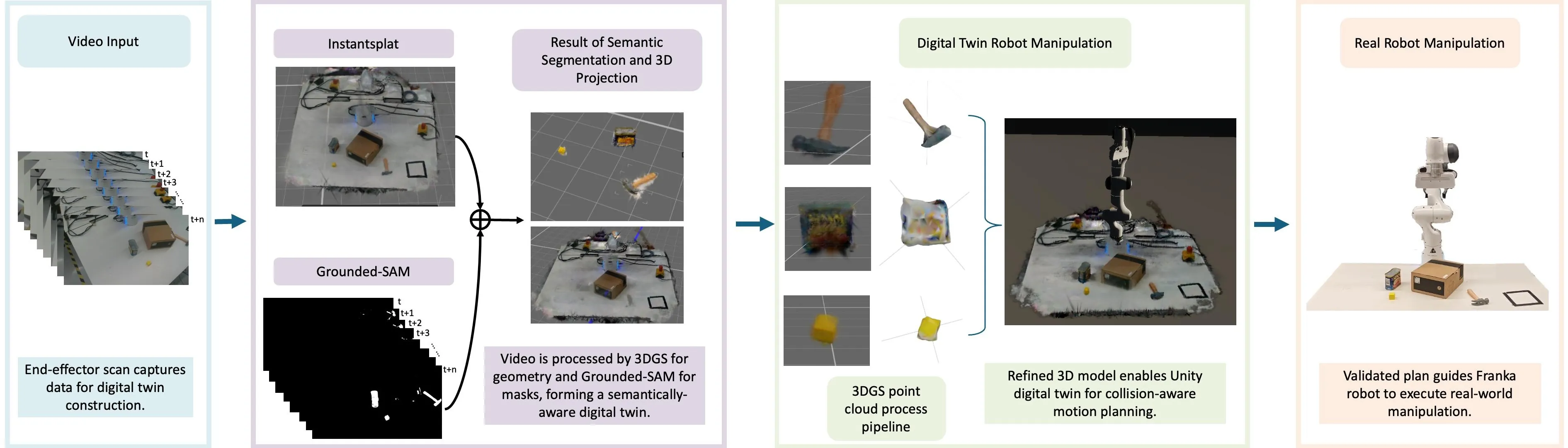
Developing high-fidelity, interactive digital twins is crucial for enabling closed-loop motion planning and reliable real-world robot execution, which are essential to advancing sim-to-real transfer. However, existing approaches often suffer from slow reconstruction, limited visual fidelity, and difficulties in converting photorealistic models into planning-ready collision geometry. We present a practical framework that constructs high-quality digital twins within minutes from sparse RGB inputs. Our system employs 3D Gaussian Splatting (3DGS) for fast, photorealistic reconstruction as a unified scene representation. We enhance 3DGS with visibility-aware semantic fusion for accurate 3D labelling and introduce an efficient, filter-based geometry conversion method to produce collision-ready models seamlessly integrated with a Unity-ROS2-MoveIt physics engine. In experiments with a Franka Emika Panda robot performing pick-and-place tasks, we demonstrate that this enhanced geometric accuracy effectively supports robust manipulation in real-world trials. These results demonstrate that 3DGS-based digital twins, enriched with semantic and geometric consistency, offer a fast, reliable, and scalable path from perception to manipulation in unstructured environments.